Definiowanie modelu motoszybowca z silnikiem elektrycznym. Aparatura Graupner MC-20/26/28
Współczesne aparatury do zdalnego sterowania mają sporo możliwości, ale jest to okupione skomplikowanym, rozbudowanym menu. Niestety, często jesteśmy zaniedbywani przez producentów sprzętu, którzy nie zapewniają instrukcji obsługi w języku polskim. W tekście zaprezentowałem swój sposób na wykonanie definicji dla motoszybowca z napędem elektrycznym. Korzystając z metody opisanej w tekście można wykonać definicję ustawień dla dowolnego modelu motoszybowca mającego napęd elektryczny, klapy i lotki, usterzenie „V” lub „T” – zawodniczego F5J lub rekreacyjnego, wykonanego z pianki. W kolejnych krokach opisano definicję nastaw modelu motoszybowca z napędem elektrycznym, który wyposażono w 6 serwomechanizmów. Skrzydła mają 2 lotki oraz 2 klapy. Model ma usterzenie motylkowe sterowane za pomocą dwóch niezależnych serwomechanizmów. Przykładową definicję wykonano dla modelu Albatros produkowanego przez firmę Modelot z Bielawy.
Do kontrolowania modelu motoszybowca, takiego jak Albatros, jest wymagany odbiornik mający co najmniej 7 kanałów, a więc odnosząc się do oferty Graupnera – odbiornik 8-kanałowy GR-16. Co prawda, można kontrolować serwomechanizmy klap za pomocą pojedynczego kanału dołączając je do kabla-rozdzielacza, tak zwanego „Y” i wówczas powinien wystarczyć odbiornik 6-kanałowy, jednak wtedy model musi mieć tak zamontowane serwomechanizmy klap, aby wychylały się one w tę samą stronę, a same dźwignie i popychacze powinny być wykonane w taki sposób, aby zapewniały równą i równomierną pracę oraz możliwość mechanicznego wyrównania. A więc w praktyce powinny mieć regulowaną długość.
Odbiorniki 6-kanałowy GR-12 i 8-kanałowy GR-16 różnią się zasięgiem. Producent podaje, że GR-12 zapewnia 2 tys. metrów zasięgu, a GR-16 do 4 tys. metrów. Zasięg jest podawany w warunkach idealnych. W terenie mogą mieć na niego wpływ różne czynniki zewnętrzne, takie jak przeszkody terenowe, źródła sygnału radiowego itp. Do dużego modelu szybowca lub motoszybowca na pewno lepszy będzie odbiornik umożliwiający uzyskanie większego zasięgu. Duży model jest dobrze widoczny na daleką odległość, co zachęca do dalekich „wypraw” w poszukiwania noszenia. W czasie takiej „wyprawy” lepiej nie znajdować się na granicy zasięgu i nie stracić kontroli nad modelem. Odbiorniki GR-12 i GR-16 różnią się między sobą nie tylko liczbą obsługiwanych kanałów, ale także liczbą anten. Odbiornik GR-16 ma 2 anteny, co przy ich poprawnym ustawieniu (pod kątem 90 stopni względem siebie) pozwala na wykorzystanie zalet technologii MIMO i przez to zwiększenie zasięgu.
Model Albatros z fotografii to szybowiec zboczowy, którym ze względu na stosunkowo nieduże wymiary lata się raczej w niewielkiej odległości, nieprzekraczającej tysiąca metrów. Mimo tego używam w nim odbiornika 8-kanałowego, ponieważ daje mi on możliwość niezależnego sterowania serwomechanizmami oraz eksperymentowania z różnymi ustawieniami modelu. W modelu piankowej Gamy z powodzeniem używałem odbiornika 6-kanałowego kontrolując obie klapy za pomocą kanału 5. Sposób dołączenia odbiorników GR-12 i GR-16 do poszczególnych serwomechanizmów podano w tabeli 1.
Tabela 1. Połączenia odbiornika z serwomechanizmami
| Opis funkcji | Numer kanału | |
| GR-12 | GR-16 | |
| Regulator silnika (BEC+ESC) | 1 | 1 |
| Lewa lotka | 2 | 2 |
| Lewa strona usterzenia „V” | 3 | 3 |
| Prawa strona usterzenia „V” | 4 | 4 |
| Prawa lotka | 5 | 5 |
| Lewa klapa | 6 | 6 |
| Prawa klapa | 5 | 7 |
Model jest wyposażony w silnik, więc do kanału kontrolnego nr 1 należy dołączyć regulator silnika. Jeśli ten regulator będzie wyposażony zasilacz (BEC), to przez złącze tego kanału będziemy również zasilali całą elektronikę w modelu. Jeśli zastosujemy regulator typu Opto (bez wbudowanego zasilacza), to będziemy musieli odrębnie doprowadzić zasilanie, na przykład korzystając z wolnego kanału kontrolnego nr 8 (w GR-16) lub z kabla typu „Y”. Włącznik jest raczej zbędny, ponieważ zasilanie modelu można włączyć/wyłączyć dołączając lub odłączając akumulator.
Schematy propozycji wykonania połączeń w modelu motoszybowca pokazano na rysunku 1 (odbiornik 6-kanałowy GR-12) oraz rysunku 2 (odbiornik 8-kanałowy GR-16). Przypomnę tylko, że przykład dotyczy modelu typu Albatros. Wielu modelarzy wykonuje znacznie bardziej złożone modele szybowców, mające oprócz klap i lotek również hamulce aerodynamiczne lub dzielone klapy.
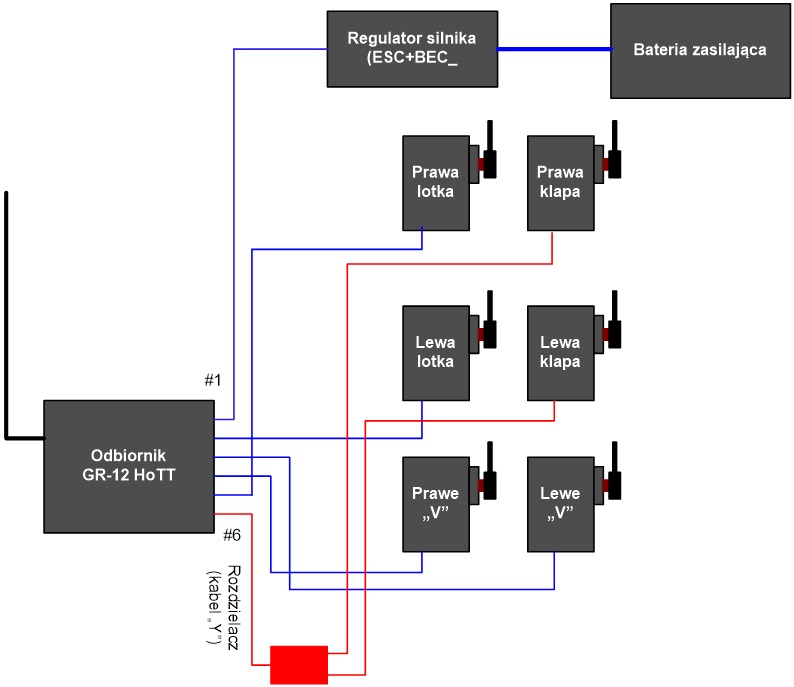
Rysunek 1. Połączenia odbiornika GR-12 z instalacją w modelu
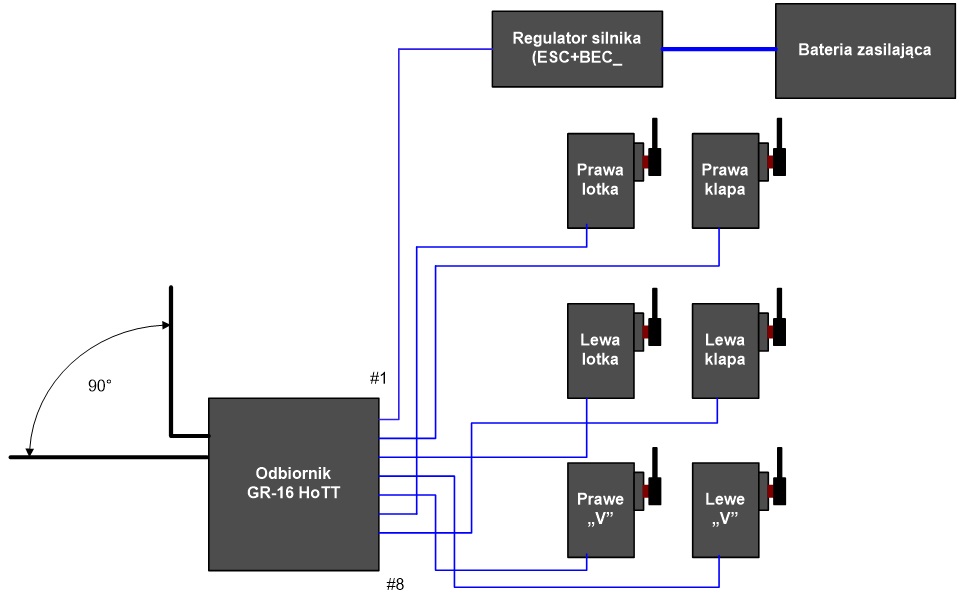
Rysunek 2. Połączenia odbiornika GR-16 z instalacją w modelu
Podczas wprowadzania nastaw za każdym razem wyboru dokonuje się za pomocą przycisków , najczęściej tych po prawej stronie pulpitu. Wybór zatwierdza się SET, a rezygnuje z niego ESC.
Podstawowe ustawienia modelu
Zakładamy, że na liście modeli mamy pozycje oznaczone ***free***, co oznacza, że dana pozycja jest wolna. W menu głównym wskazujemy Model select, a następnie ***free***. Po wyświetleniu ekranu Select model type wybieramy symbol samolotu i potwierdzamy dotykając SET. Pojawi się pytanie BIND? o to, czy chcemy przyporządkować do tej pozycji odbiornik. Dotykamy ESC po lewej stronie co spowoduje zamkniecie okienka bez dołączenia odbiornika – zrobimy to na późniejszym etapie, po określeniu typu modelu oraz wstępnym ustawieniu serwomechanizmów.
Po zamknięciu okienka BIND? dotykamy SET po prawej stronie i z wyświetlonego menu wybieramy Base setup model. Podświetlamy pierwszą pozycję Mod.name, dotykamy SET i wpisujemy nazwę modelu. W tym przykładzie jest to Albatros. Dla przypomnienia, litery wybieramy za pomocą przycisków umieszczonych po lewej stronie, natomiast na ramce nazwy przesuwamy kursor za pomocą przycisków strzałek po prawej stronie. Wpisywanie nazwy kończymy dotykając ESC. Jeśli chcemy usunąć literę pozostawiając w jej miejscu pustą przestrzeń, to po prawej stronie jednocześnie dotykamy strzełek w górę i w dół.
Po wpisaniu nazwy podświetlamy linię Stick mode. Jest to linia, w której możemy określić tryb pracy drążków sterowniczych. Osobiście używam Mode 2, w którym drążek gazu oraz steru kierunku jest po lewej stronie, a drążek lotek i steru wysokości jest po stronie prawej. Parametr Mode może być zmieniony po dotknięciu SET za pomocą przycisków kursora po prawej stronie. Ustawianie kończy ponowne dotknięcie SET. Binding model type określa rodzaj powiązania pomiędzy nadajnikiem a odbiornikiem. Typowo należy wybrać Model, co oznacza indywidualne powiązanie tylko z tym modelem i tylko z jednym, względnie dwoma odbiornikami.
Linię module na razie pomijamy. W linii DSC Output wybieramy PPM16, co umożliwia kontrolowanie 8 kanałów. Po dokonaniu wyboru dotykamy ESC, co powoduje powrót do menu głównego.
Typ modelu
Teraz z menu głównego wybieramy linię Model type i dotykamy SET. Nasz model nie ma silnika, więc w linii Motor at C1 wybieramy Back. Krótko o opcjach dostępnych w tej linii. Wybranie Back oznacza, że nasz model ma silnik, którego obroty zwiększamy odpychając drążek od siebie. Z kolei Front to sytuacja przeciwna – obroty zwiększamy przyciągając drążek do siebie. Wybranie None oznacza, że model nie ma żadnego silnika, co jest typowe dla modelu szybowca.
W linii Tail type (rodzaj usterzenia) wybieramy V-tail, co spowoduje automatyczne załączenie miksera dla usterzenia motylkowego. Jeśli model ma klasyczne usterzenie, to pozostawiamy Normal.
Nasz model ma 2 klapy i 2 lotki sterowane za pomocą niezależnych serwomechanizmów. Jeśli mamy odbiornik 8-kanałowy GR-16, to w linii Aile/flaps (lotki/klapy) przyciskami w górę/w dół wybieramy parametr 2AIL2FL. Jeśli dysponujemy odbiornikiem 6-kanałowym GR-12, to wybieramy 2AIL1FL. Wybranie wymienionych opcji powoduje automatyczne przyporządkowanie funkcji kontrolnych do odpowiednich wyjść odbiornika – wystarczy dołączyć serwomechanizmy zgodnie ze schematem, a oprogramowanie nadajnika samo dba o odpowiedni rozdział funkcji kontrolnych.
Linia Brake Off umożliwia nam zdefiniowanie położenia drążka gazu, które będzie powodowało wyłączenie hamulca. Aby ustalić je należy przesunąć drążek gazu w maksymalne położenie od siebie lub do siebie (zależnie od preferencji) i dotknąć SET. Liczba
-100% oznacza, że hamulec będzie wyłączony przy położeniu drążka do siebie, natomiast +100% – od siebie. Używam położenia -100%, co powoduje, że hamulec jest załączany w miarę pchania drążka do przodu. W modelu motoszybowca ma to też inne uzasadnienie.
Jeśli silnik i hamulec są kontrolowane za pomocą drążka gazu, a silnik ma obroty maksymalne, gdy drążek jest przesunięty do przodu, to ustawienie Brake Off=+100% spowoduje, że faza lotu normalnego musi być włączana przy maksymalnych obrotach silnika. Inaczej, po zmniejszeniu obrotów silnika do minimum, a więc po osiągnięciu żądanej wysokości lotu, włączenie fazy lotu normalnego ze względu na położenie drążka gazu spowoduje natychmiastowe zadziałanie hamulca, w tym wypadku załączenie funkcji butterfly (crowl). Oczywiście, w fazie lotu normalnego nie musimy definiować hamulca, a do lądowania możemy utworzyć specjalną fazę i nazwać ją lądowanie, ale z doświadczenia wiem, że im prostsze nastawy modelu, tym lepiej. Mnożenie kolejnych faz przy jednoczesnym braku możliwości opisania, który przełącznik do czego służy powoduje, że jeśli odłożymy model na półkę i wrócimy do niego za jakiś czas, to kompletnie nie wiadomo, co włącza dany przełącznik. Dobrze jest więc robić to w jakiś jeden, zgodny z naszymi przyzwyczajeniami sposób. W przykładowym modelu, mimo iż zdefiniowałem 4 fazy, to w praktyce najbardziej przydają się 2 pierwsze: start i normalny lot. Jednak w każdej zdefiniowanej fazie za wyjątkiem start (Launch) zdefiniowałem możliwość włączenia hamulca, ponieważ zdarzało mi się zapomnieć, że akurat model jest w fazie lotu w termice (Thermal), a w niej nie działa hamulec.
Hamulec może być załączany również za pomocą innych manipulatorów, jednak w tym przykładzie pozostańmy sterowaniu za pomocą drążka gazu i dlatego na prawo od wartości procentowej pozostawiamy parametr In 1, to znaczy sterowanie przez kanał kontrolny nr 1 (drążek gazu). Po ustawieniu wartości, w której hamulec jest wyłączany dotykamy ESC i wracamy do menu głównego.
Pozostała do wykonania jeszcze jedna nastawa związana z silnikiem. W każdym modelu, obojętnie czy z silnikiem spalinowym, czy z elektrycznym, używam wyłącznika silnika. W Graupnerze możliwość przyporządkowania funkcji włącznika silnika pojawia się w menu Base setup model, gdy w Model type ustawimy parametr Motor at C1 na wartość Back lub Front.
Aby zdefiniować włącznik silnika wchodzimy do menu Base setup model. Za pomocą przycisków w górę/w dół wybieramy linię cut off. Dotykając w prawo przechodzimy do ostatniej kolumny po prawej stronie, w której w tym momencie będą wyświetlone poziome kreski. Zwykle jako wyłącznika silnika używam dwupozycyjnego przełącznika z blokadą SW10, zamontowanego obok górnego wyświetlacza. Silnik jest włączony, gdy SW10 jest w pozycji do góry/od siebie.
Przełączamy SW10 w pozycję do góry/od siebie. Dotykamy SET i cofamy SW10 w pozycję w dół/do siebie. Funkcja wyłącznika silnika jest zdefiniowana. Dla uniknięcia niespodzianek sprawdzamy ją jednocześnie dotykając w lewo/w prawo po lewej stronie pulpitu. Jest to skrót powodujący wejście do funkcji Servo display. Obserwujemy zachowanie się pierwszego paska na ekranie przy przesuwaniu drążka gazu. Po wyłączeniu silnika, to jest przestawieniu SW10 w pozycję w dół/do siebie, wskaźnik na pasku powinien być nieruchomy oraz powinna być wyświetlona wartość -100%. Po zmianie pozycji SW10 na do góry/od siebie poruszanie drążkiem gazu powinno zmieniać położenie wskaźnika na pasku oraz wskazywaną wartość procentową.
Wychodzimy z funkcji Servo display dotykając ESC. Kolejne dotknięcie ESC powoduje powrót do menu głównego.
Ustawianie faz lotu
Używanie faz lotu chociaż pracochłonne przy definiowaniu, to mimo tego jest bardzo wygodne, ponieważ umożliwia nam określenie położenia powierzchni sterowych modelu i wartości trymerów indywidualnie dla każdej z faz lotu. W modelu szybowca można indywidualnie ustawić położenie klap i lotek np. w fazach Launch (start) oraz Thermal (lot w termice).
Zwykle w modelach szybowców oraz motoszybowców definiuję 4 fazy lotu. Są to: start (Launch), normalny lot (Normal), lot szybki (Speed) oraz lot w termice (Thermal):
- Zwykle w fazie start (Launch) albo same klapy, albo klapy wraz z lotkami są opuszczane o pewien kąt. W tej fazie może działać silnik.
- W fazie prędkość (Speed) klapy są podnoszone w górę wraz z lotkami. W tej fazie nie działa silnik.
- W fazie termika (Thermal) klapy są nieco opuszczane. W tej fazie nie działa silnik.
- W fazie normalnego lotu klapy oraz lotki są w położeniu neutralnym. W tej fazie nie działa silnik.
Wykonajmy definicję 4 podanych wyżej faz lotu. W tym celu z menu głównego wybieramy Phase settings. Po pierwsze, nazwiemy fazę, a po drugie ustawimy powiadomienie głosowe. W pozycji Pha 1, w kolumnie Name dotykamy SET i za pomocą strzałek wybieramy Launch. Po jego wybraniu dotykamy SET i za pomocą w prawo przechodzimy do 3 kolumny, która na dole ekranu jest opisana motor. Dotykamy SET i za pomocą strzałek wybieramy yes. Wybór potwierdzamy dotykając SET. Parametr yes powoduje wyłączenie funkcji butterfly (crow) i włączenie silnika. Teraz przechodzimy do ostatniej kolumny po prawej, aż w dolnej linii wyświetli się napis Announce. Dotykamy SET i za pomocą w górę/w dół wybieramy komunikat głosowy 357.LAUNCH.
Dotykamy SET i za pomocą w dół przechodzimy do linii poniżej. Dotykając w lewo cofamy się do pierwszej kolumny. Teraz po dotknięciu SET wybieramy Speed. Zatwierdzamy SET i dotykając przechodzimy do ostatniej kolumny po prawej stronie (Announce). Za pomocą w górę/w dół wybieramy komunikat głosowy 369.SPEED. Dotykamy SET.
W ten sam sposób w dwóch kolejnych liniach ustawiamy kolejno Normal oraz Thermal przyporządkowując im odpowiednio komunikaty 365.NORMAL oraz 359.THERMAL. Proponuję, aby we wszystkich liniach oprócz Pha1 Launch pozostawić parametr motor = no.
Po wykonaniu wymienionych wyżej czynności dotykamy ESC i wychodzimy do menu głównego.
Definiowanie przełączników faz lotu
Oprogramowanie nadajnika umożliwia nam przyporządkowanie przełączania faz lotu do przełączników logicznych i/lub do przełączników fizycznych. Przełącznikami fizycznymi nazywa się wszystkie przyciski, przełączniki, manipulatory i pokrętła fizycznie dostępne na aparaturze. Ich położenia można podejrzeć w menu Switch display. Po prawej stronie aparatury, w lewym górnym rogu mamy dostępne przełączniki SW11/12 i SW13. Załóżmy, że będą one przełączały fazy lotu w taki sposób, jak opisano to w tabeli 2.
Tabela 2. Przełączanie faz lotu
| Wybrana faza lotu | Pozycja przełącznika | |
| SW11/12 | SW13 | |
| 1. Launch (start) | W dół | Dowolna |
| 2. Speed (prędkość) | W górę | Dowolna |
| 3. Normal (normalny lot) | Środek | Dowolna |
| 4. Thermal (lot w termice) | Środek | W górę |
Definiowanie funkcji przełączników
- Z menu głównego wybieramy Phase assignment. Dotykając naprowadzamy ramkę na pole „C” znajdujące się pod napisem combi. 3-pozycyjny przełącznik SW11/12 ustawiamy w pozycji środkowej, natomiast 2-pozycyjny SW13 w pozycji w dół/do siebie. Dotykamy SET i po wyświetleniu komunikatu „Move desired switch…” przełączamy SW11/12 w pozycję w dół/do siebie.
- 3-pozycyjny przełącznik SW11/12 ponownie ustawiamy w pozycji środkowej, natomiast 2-pozycyjny SW13 w pozycji w dół/do siebie. Za pomocą przycisku przesuwamy ramkę w prawo na pole „D”. Dotykamy SET i po wyświetleniu komunikatu „Move desired switch…” przełączamy SW11/12 w pozycję do góry/od siebie.
- Nie zmieniając pozycji przełączników, za pomocą przycisku przesuwamy ramkę na pole „E”. Dotykamy SET i po wyświetleniu komunikatu „Move desired switch…” przełączamy SW11/12 w pozycję środkową.
- Nie zmieniając pozycji przełączników, za pomocą przycisku przesuwamy ramkę na pole „F”. Dotykamy SET i po wyświetleniu komunikatu „Move desired switch…” przełączamy SW13 w pozycję do góry/od siebie.
Przyporządkowanie faz lotu do przełączników
Kolejny raz dotykamy , aby przesunąć ramkę z pola „F” na sam dół, na pole z nazwą fazy lotu. Jest ono wyróżnione za pomocą znaków większości <nazwa fazy>. Teraz musimy przyporządkować poszczególne fazy do pozycji przełączników:
- Ustawiamy przełączniki SW11/12 oraz SW13 w pozycji do siebie/w dół. Jeśli jako pierwszą mamy zdefiniowaną fazę Launch (start), to w dolnej linii pojawi się komunikat „1 Launch”. Jeśli nie, to dotykamy SET i za pomocą wybieramy fazę 1 Launch. Wybór potwierdzamy dotykając SET.
- Przełączamy SW11/12 w pozycję środkową pozostawiając SW13 w położeniu do siebie/w dół, dotykamy SET. Przyciskami wybieramy z listy 3 Normal. Ponownie dotykamy SET.
- Przełączamy SW11/12 w pozycję od siebie/do góry pozostawiając SW13 w położeniu do siebie/w dół, dotykamy SET. Przyciskami wybieramy z listy 2 Speed. Ponownie dotykamy SET.
- Przełączamy SW13 w pozycję od siebie/w górę pozostawiając SW11/12 w pozycji od siebie/w górę, dotykamy SET. Przyciskami wybieramy z listy 4 Thermal. Ponownie dotykamy SET.
- Przełączamy SW11/12 w pozycję środkową pozostawiając SW13 w pozycji od siebie/w górę. Dotykamy SET. Przyciskami wybieramy z listy 4 Thermal. Ponownie dotykamy SET.
- Przełączamy SW11/12 w pozycję do siebie/w dół, pozostawiamy SW13 w pozycji od siebie/w górę, dotykamy SET. Przyciskami wybieramy z listy 4 Thermal. Dotykamy SET, aby potwierdzić wybór.
Testujemy nastawy zmieniając położenia przełączników. Aparatura powinna „mówić” informując nas o nazwie wybranej fazy lotu, a w dolnej linii ekranu powinna zmieniać się nazwa fazy lotu.
Przyporządkowanie odbiornika (bindowanie)
Włączamy zasilanie odbiornika. Warto zauważyć, że odbiorniki GR-12 i GR-16 są bindowane w różny sposób. Wchodzimy do menu głównego i wybieramy pozycję Base setup model. Za pomocą przycisków kursora przesuwamy ramkę na pole oznaczone n/a znajdujące się na prawo od pola HoTT. Sposób bindowania zależy od odbiornika. W odbiorniku GR-12 należy nacisnąć i przytrzymać przycisk bindowania oznaczony SET, a następnie (po podświetleniu pola n/a!) dotknąć przycisku SET w nadajniku. Połączenie z nadajnikiem jest sygnalizowane za pomocą koloru zielonego.
W odbiorniku GR-16 należy nacisnąć i przytrzymać przycisk bindowania oznaczony SET, aż dioda świecąca w odbiorniku zacznie świecić się na przemian na zielono i na czerwono. Wtedy puszczamy przycisk, a w nadajniku (po podświetleniu pola n/a!) dotykamy przycisku SET. Połączenie z nadajnikiem jest sygnalizowane przez wyłączenie koloru czerwonego.
Mikser skrzydeł
Aby ustawić mikser dla lotek i klap warto mieć włączony model, co umożliwi sprawdzenie ich funkcjonowania. W tym celu muszą być także dołączone i wstępnie ustawione serwomechanizmy.
Do ustawiania pozycji zerowej serwomechanizmu, zakresu jego ruchu oraz kierunku (odwrotny lub normalny) służy menu Servo adjustment. Zakładam, że te podstawy użytkowania są znane czytelnikowi. Można się z nimi zapoznać w instrukcji użytkownika, której tłumaczenie jest dostępne pod adresem bit.ly/2EGTtJ7.
Zdefiniowany wcześniej wyłącznik silnika SW10 przełączamy w pozycję w dół/do siebie (wyłączając w ten sposób silnik).
Na początek sprawdzamy działanie steru wysokości. Lekko zaciągamy drążek – jeśli obie powierzchnie na motylku idą „do góry”, to ster działa poprawnie. Jeśli nie, to dla konkretnej powierzchni załączamy funkcję reverse. Teraz sprawdzamy działanie steru kierunku. Jeśli obie powierzchnie usterzenia wychylają się w tę samą stronę zgodną z położeniem drążka, to sprawdzenie steru można uznać za zakończone. Jeśli nie, to przypuszczalnie kanał 3 i 4 są zamienione. Wychylając drążek ustawiamy symetryczne działanie obu powierzchni sterowych zmieniając wartość w kolumnie „- trv +”.
Sprawdzamy działanie lotek. Przy wychyleniu drążka w lewo prawa lotka powinna wychylić się w dół, a lewa unieść. Wychylając drążek ustawiamy symetryczne działanie (to znaczy, takie samo przemieszczenie) obu lotek zmieniając wartość w kolumnie „- trv +”.
Klapy nie będą działały dopóty, dopóki nie ustawimy ich funkcjonowania w mikserze skrzydeł. Ustalamy ich położenie początkowe.
Dotykając ESC wchodzimy do menu głównego i z listy wybieramy Wing mixers. W pierwszej linii miksera noszącej nazwę Multi-flap menu => ustawiamy położenie początkowe lotek i klap. Możemy również ustawić pracę różnicową oraz przemieszczenie.
W fazie Launch (start) model ma lekko opuszczone klapy i lotki. Przyznam się, że w modelu Albatros ostatecznie zrezygnowałem z tego ustawienia pozostawiając położenie neutralne.
Podświetlamy linię Multi-flap menu =>, dotykamy SET. Ustawiamy przełączniki SW11/12 i SW13 w położeniu w dół/do siebie. W dolnej linii ekranu powinna wyświetlić się nazwa fazy lotu, to jest Launch, a po prawej stronie AILE, co oznacza, że nastawy dotyczą lotek. Podświetlamy ramką pozycję Diff. Zwykle w szybowcu lotka opuszczana powinna przemieszczać się mniej, niż podnoszona. W linii Diff. można ustawić procentową różnicę tego przemieszczenia. Dla Albatrosa z fotografii było to 60%.
W celu wpisania wartości dotykamy SET. Następnie za pomocą ustawiamy żądaną wartość. Można wychylić lotki w którąś stronę za pomocą drążka, a następnie ustawiać wartość jednocześnie mierząc ją. Po ustawieniu różnicy dotykamy SET i przechodzimy do linii fl.pos.
W linii fl.pos można ustawić, o ile zostaną opuszczone lotki. Wartość ustawiamy jak wyżej. Po jej ustawieniu przechodzimy w prawo. Na kolejnym ekranie wyświetlą się ustawienia dla klap. Podobnie jak poprzednio, w dolnej linii będzie wyświetlona nazwa fazy lotu Launch oraz nazwa zmienianego elementu, to jest FLAP (klapy). Praktycznie w tym momencie należy ustawić jedynie wartość w polu fl.pos. W czasie wprowadzania nastawy można zaobserwować opuszczanie się klap i zmierzyć je.
Przełączamy SW11/12 w pozycję środkową. W dolnej linii ekranu wyświetli się nazwa fazy Normal (normalny lot). W linii fl.pos dla FLAP powinno być 0%, identycznie jak i po naciśnięciu w lewo i wejściu do ustawień AILE (lotki). Oczywiście, można wprowadzić inną, preferowaną wartość.
Przełączamy SW11/12 w pozycję do góry/od siebie. W dolnej linii ekranu wyświetli się nazwa fazy Speed (prędkość) oraz nazwa powierzchni sterowych AILE (lotki). W linii Diff. wprowadzamy taką samą wartość, jak dla fazy Normal (np. 60%), natomiast w linii fl.pos wartość wychylenia lotek w górę. Może to być -25%, jak w przykładowym Albatrosie lub inna.
Po zatwierdzeniu nastawy (dotknięciu SET) dotykamy i przechodzimy do ekranu ustawień FLAP. Tu w linii fl.pos ustawiamy wartość wychylenia klap, na przykład -8%.
Przełączamy SW11/12 i SW13 w górę/od siebie. Na ekranie FLAP wyświetli się nazwa fazy Thermal (lot w termice). Zwykle w tej fazie nieznacznie opuszcza się klapy. Dlatego w pozycji fl.pos ustawiamy wartość, o którą mają być opuszczone klapy. W Albatrosie było to +7%.
Po ustawieniu klap naciskamy i przechodzimy do ekranu AILE (lotki). W linii Diff. wprowadzamy taką samą wartość, jak dla fazy Normal (np. 60%), natomiast w linii fl.pos pozostawiamy wartość 0% (neutralna pozycja lotek).
Dotykamy ESC i wracamy do menu Wing mixers. Teraz zajmiemy się hamulcem, który w tym rodzaju szybowca uzyskuje się dzięki opuszczeniu obu klap i uniesieniu obu lotek. Ta pozycja powierzchni sterowych jest nazywana motylem (butterfly) lub krukiem (crow).
Po pierwsze musimy zdecydować, w której fazie będzie używany hamulec. Proponuję, aby były to fazy lotu normalnego (Normal) i w termice (Thermal). Pierwsza, ponieważ to naturalne, a druga, ponieważ łatwo zapomnieć się przy lądowaniu. Pamiętajmy bowiem, że hamulec będzie działał wyłącznie w tych fazach, w których zostanie załączony.
Ustawiamy przełącznik SW11/12 w pozycji środkowej, a SW13 w pozycji w dół/do siebie. Odpowiada to załączeniu fazy Normal.
Za pomocą wybieramy linię Brake settings => i dotykamy SET. W górnej linii opisanej jako Crow, w pozycji po lewej stronie ustawiamy maksymalną procentową wartość uniesienia lotek. Dla mojego Albatrosa było to +35%. Zaleca się, aby było to około połowy maksymalnego uniesienia lotek. W kolejnej pozycji linii Crow (na prawo od pozycji lotek) ustawiamy maksymalną procentową wartość dla opuszczenia klap. W Albatrosie było to +50%. Nastawę sprawdzamy poruszając drążkiem gazu. Niektórzy załączając tę funkcję za pomocą wyłącznika – w tym przykładzie pozostawiono możliwość płynnej regulacji.
W linii D.red wprowadzamy procentową wartość redukcji wychylenia lotek. Jeśli będziemy poruszali drążkiem lotek, to zadziałają one w taki sposób, że wartość z drążka doda się do wartości ustawionej dla funkcji hamulca, co może spowodować, że lotka przemieści się poza dopuszczalną pozycję i w konsekwencji może to doprowadzić do uszkodzenia mechanicznego. Wartość w linii D.red pozwala na zredukowanie przemieszczenia unoszonej lotki. Dla Jaskółki była to wartość +60% (zbliżona do parametru w linii Diff. w menu Multi-flap menu =>).
Doświadczalnie i już w locie dobieramy parametr Elevator curve odpowiedzialny za offset przekładający się na wychylenie steru wysokości w miarę zmiany położenia drążka gazu. Załączenie hamulca powoduje silne opuszczenie klap, a przez to zadzieranie modelu, co kompensuje się oddając drążek steru wysokości. Wartość wpisana w linii Elevator curve umożliwia zautomatyzowanie oddawania drążka steru wysokości. Na tym etapie wprowadzania nastaw można wstępnie ustawić pewną wartość, ale dopiero próby w locie mogą ją potwierdzić.
Dla Albatrosa z tego przykładu wartość Point L wynosiła 0%, natomiast wartość Point H -43%. Zależność położenia drążka gazu od wychylenia steru wysokości była liniowa – linia prosta pomiędzy punktami minimalnego i maksymalnego wychylenia drążka. Aby wprowadzić wartości, przy załączonej fazie lotu przesuwamy drążek w pozycję, w której lotki i klapy wychylą się maksymalnie. W dolnej linii ekranu wyświetli się etykieta Point H. Puszczamy drążek gazu i dotykamy SET. Za pomocą wprowadzamy żądaną wartość (w Albatrosie było to -43%) i ponownie dotykamy SET.
Zmieniamy pozycję przełączników na odpowiadającą fazie Thermal. Powtarzamy czynności mające na celu ustawienie hamulca. Wpisujemy identyczne wartości, jak w fazie Normal.
Linie AI -> RU i FL -> EL pomijamy, nie wprowadzamy żadnych nastaw. Są to, odpowiednio, parametry umożliwiające zmiksowanie lotek ze sterem kierunku oraz klap ze sterem wysokości. Na tym etapie pozostawmy te parametry bez zmian.
W odpowiednich fazach, przy pozycji SW10 (wyłącznik silnika) w dół/do siebie, sprawdzamy działanie hamulca i równoczesną z nim pracę steru kierunku w stronę powodującą nurkowanie modelu.
Pomiar czasu
Dla swojego Albatrosa zdefiniowałem funkcjonowanie dwóch timerów: jeden odmierza całkowity czas lotu od momentu załączenia silnika, to jest przełączenia SW10 w pozycję w górę/od siebie, a drugi mierzy czas lotu na silniku. Abstrahując od prędkości wznoszenia modelu, która może być różna zależnie od stosunku mocy czy ciągu do ciężaru, daje to materiał do ciekawych wniosków.
Dla potrzeb tego pomiaru zdefiniowałem włącznik logiczny, który działa, gdy silnik jest włączony, a położenie drążka gazu jest większe niż około -60%. W tym położeniu w moim modelu jest wyłączany hamulec i załączany silnik.
Całkowity czas lotu jednocześnie jest czasem logowania, w którym są zapisywane dane na karcie SD. Jego pomiar jest łatwo włączyć, ponieważ wystarczy zmiana pozycji włącznika silnika SW10. Niestety, w zmianie pozycji tego włącznika trzeba również pamiętać przy starcie z ręki, na zboczu, wykonywanym bez silnika.
Aby uruchomić timery w opisany wyżej sposób trzeba posłużyć się dwoma rodzajami włączników: kontrolnym (Control switch) i logicznym (Logical switch). W pierwszym (kontrolnym) określimy położenie drążka gazu, od którego będzie mierzony czas, a w drugim (logicznym), jako że drążek gazu załącza również hamulec, powiążemy go z włącznikiem silnika. To znaczy, pomiar czasu pracy silnika będzie następował tylko wtedy, gdy silnik będzie włączony (SW10 w pozycji do góry/od siebie).
Zacznijmy od włącznika kontrolnego. W menu głównym znajdujemy pozycję Control switch i podświetlając ją, mając ustawioną ramkę w kolumnie SEL, dotykamy SET. Ustawiamy się na linii C1 i dotykamy SET. Zostanie wyświetlony komunikat „Move desired control adj.”, co oznacza „Przesuń żądany manipulator funkcji kontrolnej”. Teraz przesuwamy drążek gazu – w linii zostanie wyświetlona wartość Cn1, to znaczy kanał kontrolny 1. Nie zmieniając linii dotykamy i przesuwamy ramkę o jedną pozycję w prawo (w dolnej linii ekranu kolumna jest nazwana STO). Teraz przesuwamy drążek gazu o kilka ząbków do góry i dotykamy SET. W kolumnie zostanie wyświetlona wartość np. -60%. Pomijamy pozostałe dwie kolumny po prawej stronie – mają się w nich wyświetlać symbole strzałki (=>) oraz poziomych kresek (---).
Sprawdzamy działanie włącznika kontrolnego C1. Przesuwanie drążka gazu powinno powodować zamykanie się/otwieranie symbolu włącznika umieszczonego po lewej stronie, obok etykiety C1.
Tabela 3. Definicje włączników logicznych
| Logical switch | ||||
| L1 | C1 |
AND | 10 |
L1 |
| L2 | --- | AND | --- | L2 |
| L3 | --- | AND | --- | L3 |
| L4 | --- | AND | --- | L4 |
Definicja włącznika kontrolnego, a więc zależnego od funkcji kontrolnej, została wykonana. Dotykamy ESC i przechodzimy do menu głównego. Z linii poniżej wybieramy Logical switch i dotykamy SET. Wskazujemy linię L1. W pierwszym polu po lewej dwukrotnie dotykamy SET. Zostanie wyświetlone okienko, z którego dotykając wybieramy C1 i dotykamy SET. Dwukrotnie dotykamy i ustawiamy ramkę w trzeciej kolumnie od lewej, w miejscu trzech poziomych kresek. Uważając na to, aby przypadkowo nie uruchomić silnika (drążek gazu powinien być w pozycji na minimum) przełączamy włącznik silnika SW10 w pozycję w dół/do siebie. Dotykamy SET i zmieniamy pozycję SW10 na w górę/od siebie.
Jeśli mamy włączone zasilanie modelu, to wyłączamy je wyciągając baterię lub odłączamy silnik i testujemy działanie włącznika logicznego. Jeśli silnik jest włączony (SW10 w górę/od siebie) i drążek gazu jest przesunięty w przód, to symbol włącznika przy L1 w prawej kolumnie powinien być załączony. Jeśli SW10 jest wyłączony lub drążek jest w pozycji do tyłu, to symbol wyłącznika powinien być otwarty.
Dotykamy ESC i wychodzimy do menu głównego.
Włączniki timerów
W menu głównym wybieramy Timers (general). Dotykając wybieramy linię z etykietą Top i dotykamy SET. Za pomocą wybieramy Stop i zatwierdzamy dotykając SET. Ponownie dotykamy i za pomocą dotknięcia SET wybieramy linię Centr:. Z wyświetlonej listy wybieramy Log t. Teraz 4-krotnie dotykamy , aż dotrzemy do ostatniej kolumny.
Ustawiamy przełącznik SW10 w pozycji w dół/do siebie. Dotykamy SET przy kursorze ustawionym na linii Centr:. Po wyświetleniu okienka z komunikatem zmieniamy pozycję przełącznika SW10 na w górę/od siebie. W ten sposób timer logowania zostanie uruchomiony po włączeniu silnika.
Za pomocą strzałek przechodzimy do linii Top. W ostatniej kolumnie po prawej dwukrotnie dotykamy SET i z wyświetlonej listy wybieramy L1. Timer będzie zatrzymywany, gdy silnik będzie wyłączony, co odpowiada albo zmianie pozycji przełącznika SW10, albo zmianie położenia drążka gazu, jeśli silnik jest włączony.
Na koniec jedna uwaga. Wspólnie z kolegą mamy taką zasadę, że minimalny czas treningu w jednym locie wynosi 30 minut. Warto, aby zakończenie upływu tego czasu było sygnalizowane przez aparaturę.
W poprzednio użytkowanej przeze mnie Sanwie odmierzenie minuty było sygnalizowane przez krótki pisk. W Graupnerze na próżno szukać tej jakże użytecznej funkcji.
Aby ustawić czas treningu, dotykając strzałek po prawej stronie pulpitu ustawiamy się w linii Centr. dotykając strzałek wybieramy drugą kolumnę od prawej opisaną w dolnej linii jako Timer. Dotykamy SET i za pomocą strzałek po prawej stronie ustawiamy 30. Po dwukropku można również ustawić sekundy, ale raczej w tej sytuacji mija się to z celem. Dotykamy SET zatwierdzając 30:00 w kolumnie Timer. Teraz po starcie, to jest po zmianie pozycji SW10 na w górę/od siebie, timer będzie odmierzał czas od 30 minut do zera. Po osiągnieciu zera zostanie na krótką chwilę włączona wibracja i dźwięk. Jeśli chcemy, aby sygnalizacja rozpoczęła się wcześniej, na przykład chcemy minutę wcześniej rozpocząć podejście do lądowania, to w kolumnie leżącej na prawo od ustawianej wartości, nazwanej w dolnej linii Alarm dotykamy SET i za pomocą po prawej stronie ustawiamy 60s. Zatwierdzamy dotykając SET i wracamy do ekranu głównego dwukrotnie dotykając ESC.
Na koniec
Dzięki ustawieniu faz lotu będziemy mogli nie tylko zmieniać sposób zachowania się modelu poprzez wstępne ustawienie powierzchni sterowych, ale również trymować model zależnie od fazy. W motoszybowcu fazy lotu dają nam też możliwość wyboru, kiedy będziemy używali silnika.
Zwykle modelem motoszybowca lata się w taki sposób, że załącza się silnik, wychodzi na pewną wysokość, a następnie próbuje „łapać” noszenie, co nie zawsze udaje się. Dlatego pewną niedogodność w opisanej definicji nastaw motoszybowca stanowi fakt, że po starcie silnik jest wyłączany przy zmianie fazy lotu. Wymaga to od pilota modelu pamiętania, że aby „poderwać” model jest wymagane przełączenie fazy lotu na Launch (start). Podobnie lądowanie z użyciem hamulca (butterfly, crow) wymaga zmiany fazy lotu na inną niż Launch. Z różnych powodów warto jednak wyrobić sobie ten nawyk. Po pierwsze, uczy on planowania lotu i lądowania, a po drugie uczy też lotów bez podpierania się silnikiem. Warto też wiedzieć, że w czasie zawodów F5J używane są loggery (np. Altis), które wyłączają silnik po upływie 30 sekund i nie pozwalają na jego użycie. Mając wyćwiczony nawyk lotu bez silnika znacznie lepiej damy sobie w takiej sytuacji radę, niż wtedy, gdy w głowie jest myśl „a zawsze jakoś uratuję się silnikiem”.
Aparatura daje nam możliwość kopiowania nastaw z modelu do modelu lub z karty do modelu, więc kolejnym razem będzie można posłużyć się właśnie wykonaną definicją. Często jest tak, że do tego samego celu prowadzą różne drogi. Ten opis proszę traktować jako zachętę do samodzielnego eksperymentowania bardziej, niż jako jedyną, najlepszą receptę.
Jacek Bogusz
Sekcja Modelarska/Aeroklub Poznański
j.bogusz@onet.eu
<<< Pobierz wersję PDF >>>