Serwomechanizmy, część I
Serwomechanizmy stanowią po odbiorniku główny element wyposażenia każdego modelu zdalnie sterowanego. Upraszczając, ich zadaniem jest zamiana sygnałów sterujących na odpowiedni ruch powierzchni sterowych, czy też innych elementów ruchomych. W modelach latających będą to lotki, klapy, hamulce, otwierane luki podwozia, samo podwozie i inne. W modelach śmigłowców serwomechanizmy odpowiadają za sterowanie głowicą i wirnikiem ogonowym. W modelach pływających uruchamiają ster, windę szotową, w samochodach układ kierowniczy itd. Najszerzej stosowane i najbardziej popularne są serwomechanizmy obrotowe, ale w praktyce modelarskiej często spotyka się też napędy liniowe.
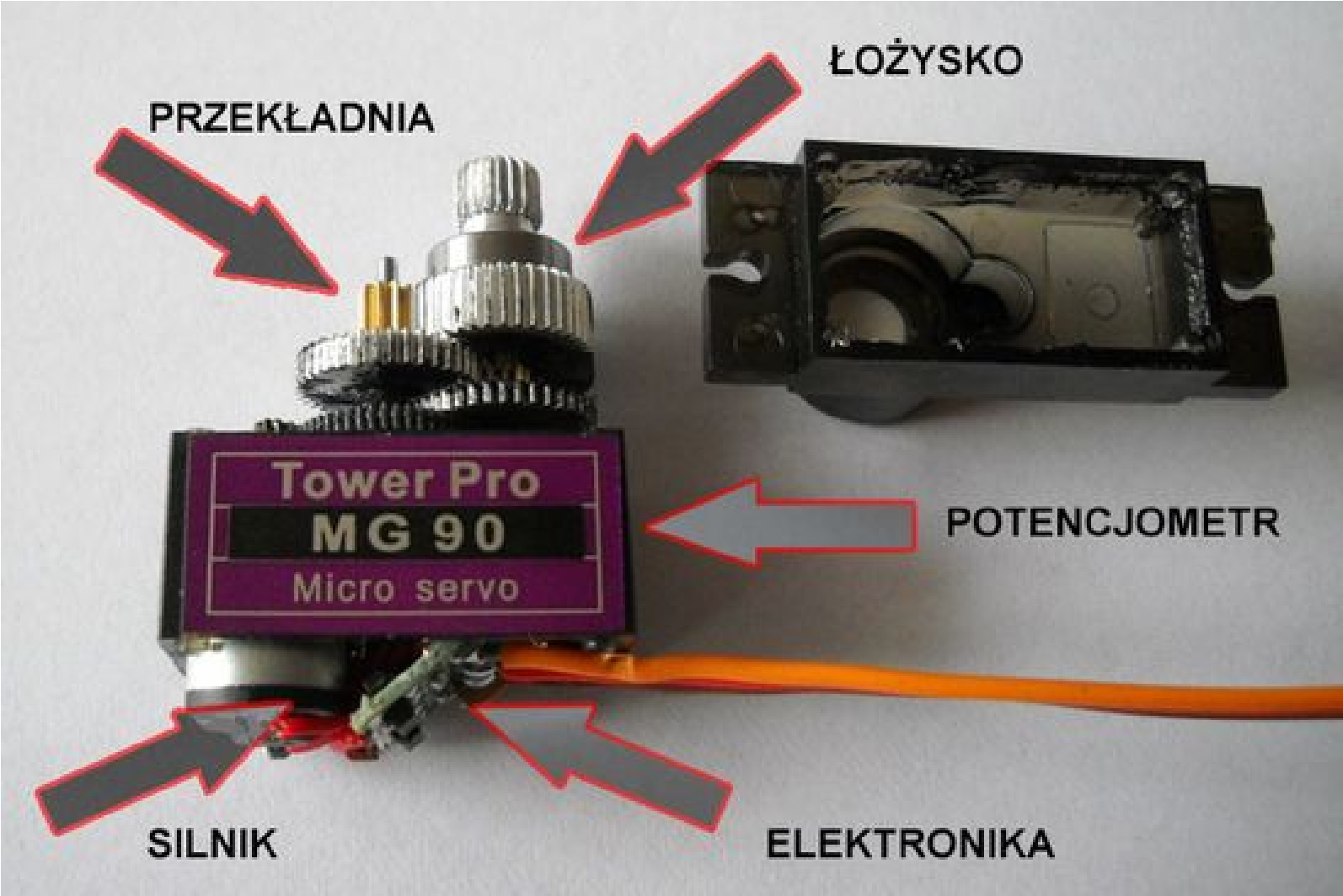
Typowy serwomechanizm jest urządzeniem złożonym z kilku elementów: obudowy, silnika prądu stałego, potencjometru, przekładni i elektronicznego układu sterującego. Zadaniem układu sterującego jest precyzyjne ustalenie położenia przekładni serwomechanizmu, która jest sprzężona z elementem wykonawczym - najczęściej orczykiem lub tarczą. Komponentem określającym położenie przekładni jest najczęściej sprzężony z nią potencjometr obrotowy. Pozycja serwomechanizmu jest ustalana za pomocą sygnału wejściowego - przebiegu o zmiennej szerokości impulsów i stałej ich częstotliwości (PWM, Pulse Width Modulation). Typowo, impulsy sterujące są powtarzane co 20ms (z częstotliwością 50Hz), ale w serwomechanizmach cyfrowych mogą być powtarzane częściej (jeśli nadajnik i odbiornik mają taki tryb pracy). Pozycja neutralna (środkowa) serwomechanizmu jest ustawiana impulsem o szerokości 1,5 ms. Obrót wału jest powodowany przez różnicę czasu trwania impulsu w odniesieniu do impulsu (położenia) neutralnego. W większości serwomechanizmów zakres czasu trwania impulsów wynosi od 1 do 2 ms, gdzie impuls o czasie trwania 1,25ms to skrajne lewe położenie, a 1,75ms to położenie skrajne prawe.
Podane informacje dotyczą głównie popularnych serwomechanizmów analogowych. W nowszych serwomechanizmach cyfrowych (digital) częstotliwość impulsów wejściowych może być większa, co pozwala na znacznie szybszą reakcję na zmianę sygnału. Okupione jest to jednak większym poborem prądu przez te mechanizmy, niż w serwomechanizmach analogowych. Ponadto, serwomechanizmy cyfrowe mają (ponownie, w porównaniu z analogowymi) większy moment trzymający (holding power) - jest on około 3 razy większy, niż ich moment obrotowy. Serwomechanizm cyfrowy o momencie obrotowym np. 6kg*cm ma moment trzymający wynoszący około 18kg*cm. W serwomechanizmach analogowych moment trzymający jest zbliżony do momentu obrotowego.
Podział serwomechanizmów
Serwomechanizmy mogą być dzielone ze względu na różne kryteria, takie jak: typ (analogowe, cyfrowe), wielkość, moment obrotowy, prędkość kątowa, materiał przekładni, typowe zastosowanie. Ten artykuł jest kierowany głównie do stawiających pierwsze kroki w modelarstwie RC, więc skupię się na najważniejszych aspektach podziału, czy też odpowiedniego doboru serwomechanizmów, pomijając szczegóły techniczne dotyczące serwomechanizmów cyfrowych i w głównej mierze skupiając się na serwomechanizmach analogowych.
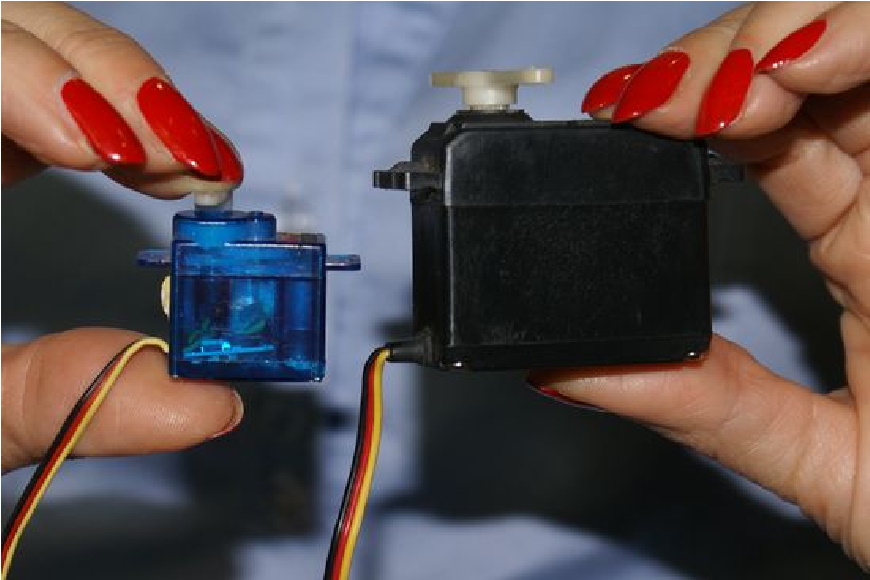
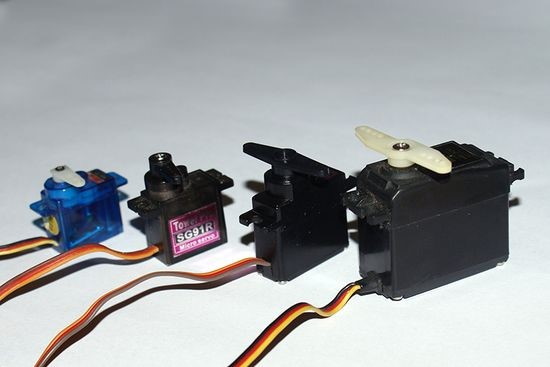
Wielkość serwomechanizmu jest zależna od modelu, w jakim serwomechanizm ma być zastosowany. Typowo, pod uwagę bierze się jego ciężar, wielkość, prędkość lotu. Początkowo nasze zainteresowanie głównie będą budziły popularne serwomechanizmy mikro i standardowe. Aby unaocznić różnicę pomiędzy tymi typami serwomechanizmów, na fotografii niżej pokazano serwomechanizm mikr Hitec HS-55 w porównaniu ze standardowym Hitec HS-300. Kolejne zdjęcie pokazuje różnicę w wymiarach różnych serwomechanizmów, gdzie od lewej są: Hitec HS-55, TowerPro SG-91R, TowerPro MG-16R i Hitec HS-300.
Podstawowym kryterium doboru serwomechanizmu są - jak już wspomniałem - wielkość i ciężar modelu. Może się co prawda zdarzyć, że niewielki ale za to bardzo szybki model będzie odstępstwem od tej reguły, jednak w typowych sytuacjach HS-55 znajdzie zastosowanie w lekkich modelach depronowych, halowych lub klasy Park Flyer. Można go użyć do obsługi sterów wysokości, kierunku, lotek itp. Tower Pro SG-90 jest nieco większe i cięższe. Nadaje się do zastosowania w większych modelach, doskonale sprawdza się jako napęd sterów wysokości i kierunku lub lotek w takich modelach, jak Easy Glider, Easy Star i podobnych. Może też służyć jako napęd przepustnicy gazu w modelach o napędzie spalinowym. MG-16R to serwomechanizm o średniej wielkości, przeznaczony do zastosowania w modelach cięższych od Easy Glidera. Z racji płaskiego kształtu obudowy dobrze nadaje się do zabudowy w skrzydłach do napędu lotek. Wreszcie, HS-300 to typowy serwomechanizm o standardowej wielkości, używany w modelach o napędzie spalinowym o rozpiętości do około 2 metrów, służący do napędu wszystkich powierzchni sterowych.
Moment obrotowy
Kryterium to określa nam do jakich zastosowań możemy danego serwomechanizmu użyć. Zgodnie z definicją, moment obrotowy wyznacza się jako iloczyn siły i ramienia. Oczywiście, są to operacje na wektorach. Po przekształceniu wzoru na moment otrzymujemy, że siła generowana na końcu dźwigni serwomechanizmu jest równa ilorazowi momentu i długości ramienia, więc jeśli producent podaje, że moment obrotowy serwomechanizmu wynosi 6kg*cm, to jak łatwo policzyć siła na ramieniu o długości 1cm wynosi 6kG, ale przy długości ramienia 2cm wyniesie połowę momentu, a więc 3kG. Upraszczając, z obliczeń wynika, że serwomechanizm powinien udźwignąć na orczyku o długości 2cm ciężar 3kg (długość ramienia mierzy się od środka osi obrotu do punktu przyłożenia siły, a więc w praktyce od śruby mocującej orczyk do miejsca zamocowania popychacza). Typowo, im większy a tym samym i cięższy serwomechanizm, tym większego momentu obrotowego można się spodziewać. Oczywiście, nie decyduje o tym jedynie wielkość obudowy, ale przede wszystkim jakość i moc użytego silnika, jakość i materiał przekładni oraz sposób łożyskowania. Uwaga: moment obrotowy jest zależny od napięcia zasilającego - maleje wraz z obniżaniem napięcia zasilania. Dlatego, jeśli szczególnie zależy nam na momencie, to należy stosować maksymalne napięcie zasilające dopuszczalne dla danego typu serwomechanizmu.
Prędkość kątowa
Parametr ten informuje o tym, w jakim czasie oś nieobciążonego serwomechanizmu obróci się o kąt 60 stopni. Szybszy serwomechanizm jest zwykle lepszy, ale też też i droższy. O ile dla serwomechanizmu sterującego przepustnicą silnika spalinowego w typowym modelu trenerka szybkość kątowa nie może nie być aż tak ważna, o tyle w razie sterowania sterem wysokości lub lotkami może czasami zadecydować o kraksie modelu. Najszybsze serwomechanizmy są używane do sterowania tylnym wirnikiem śmigłowca i głowicą modeli śmigłowców, do modeli akrobacyjnych klasy F3A. W tych przypadkach zazwyczaj używane są jak najwyższej klasy serwomechanizmy cyfrowe. W zastosowaniu amatorskim serwomechanizm o szybkości kątowej z zakresu 0,17-0,20s/60 stopni jest w zupełności wystarczający. Uwaga: prędkość kątowa jest zależna od napięcia zasilającego - maleje wraz z obniżaniem napięcia zasilania. Dlatego, jeśli szczególnie zależy nam na jak największej prędkości pracy, to należy stosować maksymalne napięcie zasilające dopuszczalne dla danego typu serwomechanizmu.
Materiał przekładni
Elementem, od którego w głównej mierze zależy moment obrotowy serwomechanizmu są silnik i przekładnia, chociaż duże znaczenie ma też obciążalność prądowa płytki sterującej. Sama przekładnia to układ bardzo precyzyjny i zarazem delikatny. Jej wytrzymałość jest uzależniona od użytych materiałów. W tańszych i popularnych serwomechanizmach zazwyczaj wałki łożyskowane są na tulejkach, natomiast zębatki przekładni są wykonane są z nylonu. W droższych serwomechanizmach używa się przekładni wykonanych z materiałów kompozytowych, karbonitu lub metalu (w tym tytanu), a łożyskowanie odbywa się za pomocą łożysk kulkowych. Wiele przekładni to mechanizmy hybrydowe, w których elementy główne przekładni są metalowe lub węglowe, a reszta zębatek jest nylonowa. Informacje o materiale przekładni i sposobie łożyskowania zazwyczaj są zawarte w oznaczeniu typu serwomechanizmu, jednak jest ono zależne od producenta i to w jego katalogach należy szukać szczegółowych informacji.
W praktyce modelarskiej są również używane serwomechanizmy przeznaczone do realizacji określonych funkcji. Wówczas to realizowana funkcja niejako definiuje budowę danego serwomechanizmu, jego wymiary i parametry użytkowe. Przykładami mogą być serwomechanizmy podwoziowe, do wind w modelach żaglowców i inne.
Przykładowe serwomechanizmy
Turnigy TGY-225 to popularny serwomechanizm do zamontowania w skrzydle. Jego cechą wyróżniającą jest płaski kształt obudowy, dzięki czemu mieści się on w zwykle cienkich skrzydłach modeli szybowców, motoszybowców itp. Ma ono 3 uchwyty montażowe rozmieszczone w taki sposób, aby jego montaż w skrzydle był maksymalnie uproszczony, a dostęp do śrub montażowych bezproblemowy.

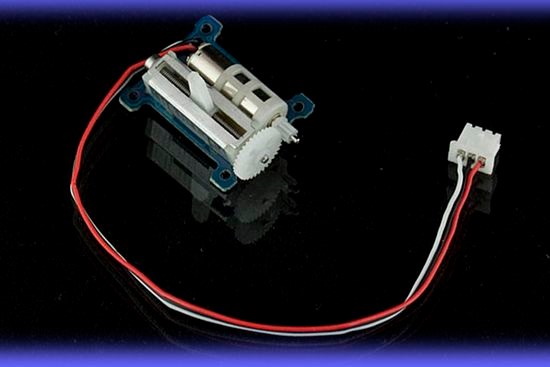
Dymond D1.5 to bardzo lekki mechanizm (jego ciężar to zaledwie 1,5g) przeznaczony do modeli halowych oraz o napędzie gumowym. Moment obrotowy wynosi w granicach 0,2kG*cm, a prędkość kątowa 0,12s/60 stopni. Inną charakterystyczną cechą jest miniaturowe złącze JST, znacznie różniące się do typowo używanych złączy JR/Futaba. Nie ma ono też osi i przymocowanego do niej orczyka czy tarczy, ale pracuje z tzw. napędem liniowym, w którym suwak jest przemieszczany za pomocą przekładni ślimakowej.
Savox-0236MG to serwomechanizm typu JUMBO. Serwomechanizm tego typu jest stosowany w dużych modelach. Charakteryzuje się on obudową o większych wymiarach, dużym ciężarem (około 160...200 g) i bardzo dużym momentem obrotowym. Obudowy mechanizmów JUMBO zazwyczaj wykonywane są z aluminium. Zwykle takie serwomechanizmy są zasilane wyższym napięciem niż standardowe 5V. Moment obrotowy serwomechanizmu Savox-0236MG wynosi do 30 kg*cm.

Hitec HS-785HB to serwomechanizm żeglarski typu winda szotowa używany w modelach jachtów regatowych klasy F5E. Charakteryzuje się one dużym momentem obrotowym (do 15kg*cm), ma większe wymiary i waży ok. 100 gram. Jego prędkość kątowa jest mniejsza, niż typowego serwomechanizmu standardowego w modelu latającym. Jednak co ważne, ten serwomechanizm nie ma bloku a jego oś może obracać się dookoła.

Tester serwomechanizmów
Pisząc o serwomechanizmach warto też wspomnieć o urządzeniu służącym do kontroli ich pracy. Za pomocą tego przyrządu jesteśmy w stanie sprawdzić kondycję serwomechanizmu, zakres kątowy wychyleń, prędkość, jakość przekładni i wiele innych. Jest to urządzenie o tyle uniwersalne, że możemy też nim wysterować regulatory napędowe obrotów silników elektrycznych szczotkowych i bezszczotkowych. W praktyce modelarza jest to jedno z podstawowych urządzeń kontrolno-pomiarowych.

październik 2014, Tomasz Motyl "Motylasty", zdjęcia: archiwum własne