Dobór elektrycznego zespołu napędowego do modelu latającego
Jaki silnik wybrać do modelu, jakie śmigło zastosować dla wybranego silnika? Te pytania bardzo często pojawiają się na różnych forach internetowych traktujących o modelarstwie lotniczym. Pomimo faktu, iż niejednokrotnie odpowiedzi padają, pytania te, a raczej całe wątki poświęcone napędom, wałkowane są non stop. O ile w początkowym okresie napędów elektrycznych modeli latających istniały jedynie ogólne wytyczne, o tyle współcześnie liczba silników, śmigieł, regulatorów obrotów oraz innych dostępnych akcesoriów mogą doprowadzić do zawrotu głowy. Lata temu, gdy istniały praktycznie tylko napędy szczotkowe i głównie budowano motoszybowce, zakładano ok 100W mocy na 1kg ciężaru modelu – to tak w uproszczeniu. Współcześnie ze względu na bardzo obszerną ofertę oraz różne typy modeli latających dobór stosownego napędu nie jest tak łatwy, jak kiedyś.
Czym jest „stosowny napęd”?
Każda klasa modeli kieruje się innymi kryteriami. O ile w modelu klasy ESA praktycznie cały lot odbywa się na pełnym gazie i kończy sie w czasie kilku minut, o tyle w modelu FPV zależy nam na jak najdłuższej pracy napędu celem uzyskania maksymalnego czasu lotu, wysokości lub odległości. Z kolei, w motoszybowcu chcemy w możliwie krótkim czasie wzbić się na pożądaną wysokość. Jeszcze inaczej jest w innych klasach modeli. Łatwo zauważyć, że zespoły napędowe rozumiane poprzez śmigło + silnik + regulator + akumulator pracują w różnych warunkach zależnych od sposobu eksploatacji modelu. Sprawa doboru napędu zazwyczaj ma się prosto w modelach budowanych z zestawów, w których producent jasno wskazuje jaki napęd zastosować (w rozumieniu silnik + śmigło), a często modele ARF są w stosowny napęd wyposażone. Zdarza się jednak, że napęd zastosowany przez producenta jest słabej jakości lub ma niezadowalającą efektywność i wtedy zaczynają się poszukiwania lepszego odpowiednika. I tutaj możemy napotkać kolejne gro pytań na forach, głównie dotyczących modeli już zadomowionych na rynku i bardzo popularnych typu Easy Glider, Easy Star etc.
Kolejnym problemem dotyczącym napędów są specyfikacje parametrów elektrycznych silników podawane przez producentów lub dystrybutorów. Często zdarza się, że taka specyfikacja jest niepełna lub podana na wyrost. Dotyczy to głównie podawanej mocy. Wszystkie te czynniki skłaniają do jednego: montujemy w modelu silnik i śmigło, które już ktoś wcześniej zastosował i w pewnym sensie rekomenduje taki zespół napędowy. Łączy się to jednak ze żmudnym przeszukowaniem informacji dostępnych głównie Internecie, podpatrywania na lotnisku wśród zaprzyjaźnionych modelarzy.
Dobór napędu do modelu warunkuje też podejście zdroworozsądkowe polegające na tym, że napęd rozumiany jako całość, czyli silnik, regulator obrotów, śmigło i akumulator dobieramy do konkretnego typu modelu. Przecież nie wyposażymy modelu typu kombat w silnik o mocy 300W, a w EasyGliderze nie zamontujemy silniczka dzwonkowego o mocy 100W. Pamiętać też musimy o tym, czego tak naprawdę oczekujemy, a raczej potrzebujemy. Przecież w modelach ESA, od których oczekuje się szybkości i dobrej zdolności do wykonywania manewrów, raczej znajdzie zastosowanie napęd szybkoobrotowy z silnikiem o wyższym Kv i śmigłem o średnicy rzędu 8 cali - nie zastosujemy tu silnika niskoobrotowego i śmigła typu slow flyer o średnicy 11 cali.
Jak dobrać napęd do modelu?
Jeśli mamy sprecyzowane wymagania odnośnie do modelu, to przystępujemy do wyboru zespołu napędowego. Na początek załóżmy, że dobieramy zespół napędowy do EasyGlidera. Pytanie, które należy sobie zadać brzmi, czy zależy nam na raczej spokojnym locie silnikowym i niezbyt szybkim wznoszeniu, czy też może bardzo szybkim locie i wznoszeniu niemal pionowym? W pierwszym wypadku odpowiednim będzie silnik klasy 3530 z regulatorem ok 25...30A, natomiast w drugim lepszym silnikiem będzie 3536 i regulator 40...50A. Skoro już mamy wybrany silnik i regulator obtorów, to stoimy przed koniecznością doboru stosownych łopat (śmigła). Czy zastosować łopaty o większej średnicy i mniejszym skoku, czy może o mniejszej ale za to o większym skoku? Jak to się wszystko ma do mocy, poboru prądu i generalnie długotrwałości lotu silnikowego? W tym momencie wkraczamy w „świat pomiarów”. Odpowiedzi na nasze pytania da nam praktycznie jedynie pomiar całego napędu na odpowiedniej hamowni.
Pomiary napędów na hamowni
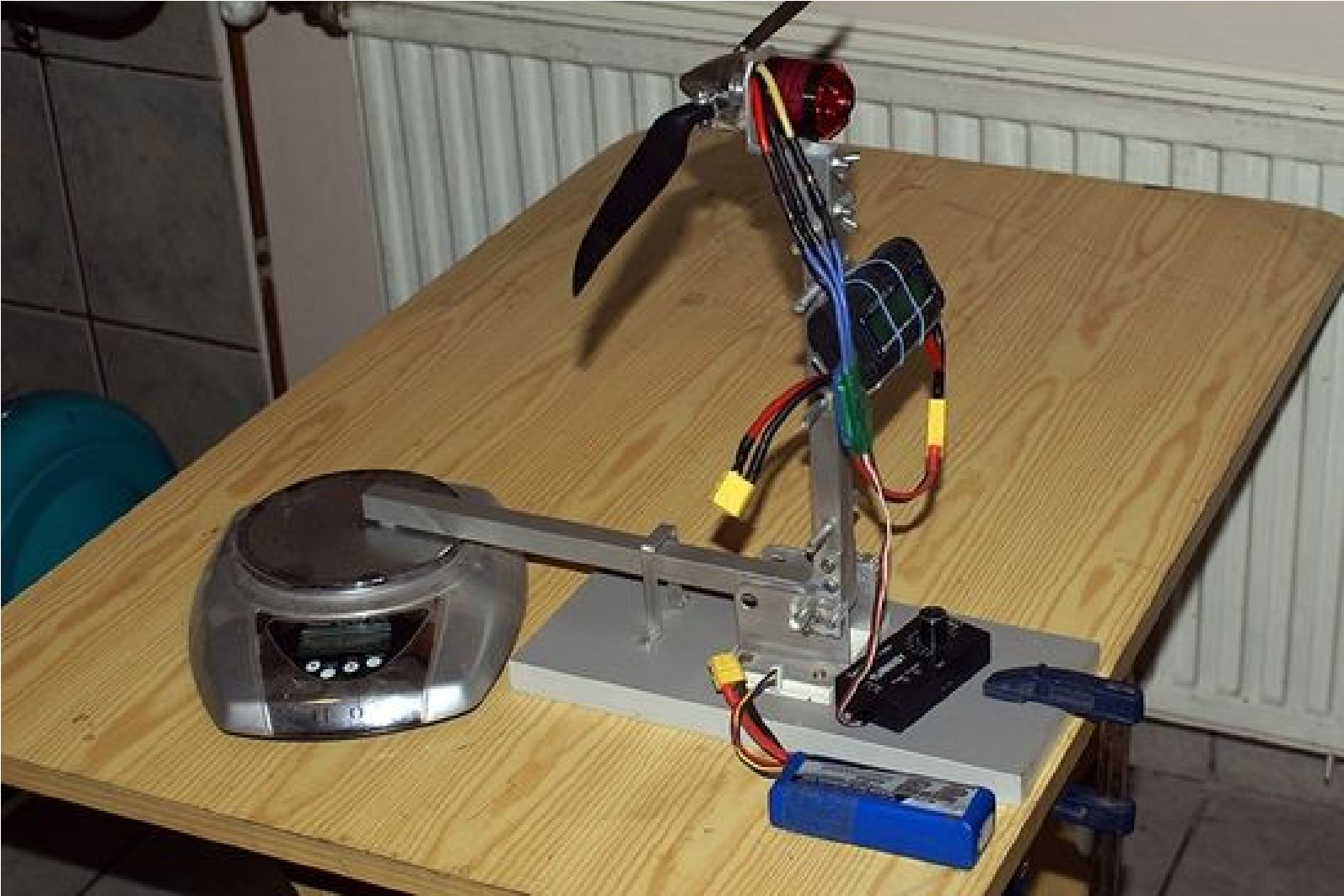
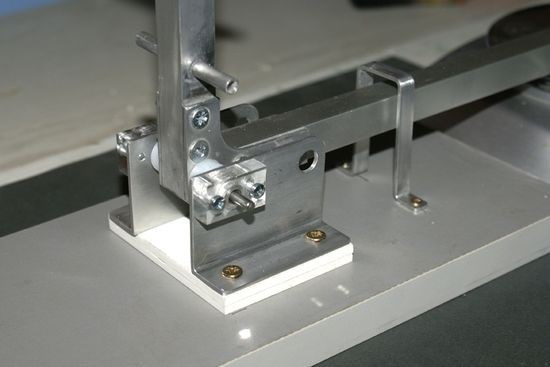
Hamownia jest urządzeniem pozwalającym nam określić parametry napędu. Możemy się posłużyć hamownią kupną lub wykonać ją we własnym zakresie. Istnieją różne urządzenia tego typu działające na różnych zasadach. Jedne oparte są o dynamometry, inne o wagi. Jedne mierzą siłę naciągu, czy też rozciągania, inne siłę nacisku. Na fotografii 2 pokazano hamownię mierzącą siłę nacisku wykonaną we własnym zakresie. Wykonano ją z płytek z tworzywa sztucznego, a ramię jest łożyskowane na kawałku drutu stalowego o średnicy 2mm. Głowica hamowni pozwala na zamocowanie różnych silniczków. Ze względu na użyty materiał oraz sposób budowy, ta hamowania służy jedynie do pomiaru napędów o małej mocy. Głównym elementem pomiarowym każdej hamowni jest waga elektroniczna lub dynamometr. Do budowy amatorskiej hamowni w zupełności wystarczy domowa waga o dokładności ok. 1g. i maksymalnym ciężarze pomiarowym do 5kg.

Projektując własną hamownię musimy zwrócić uwagę na kilka elementów pokazanych na rysunku 3. Pokazano na nim projekt hamowni typowo naciskowej. Całość zbudowano z kształtowników aluminiowych. Ramię jest łożyskowane za pomocą łożysk kulkowych. W hamowni zastosowano wymienną głowicę mocującą silniki. Jest to hamownia w kształcie litery L. Budując taką hamownię zawracamy uwagę na poprawność geometryczną urządzenia, gdzie odległość osi silnika (A) od osi obrotu ramienia powinna być jednakowa z odległością punku pomiaru (B) od odległości osi obrotu. Inaczej wynik pomiaru będzie musiał być przeliczany zgodnie z uwzględnieniem długości ramion, co może być kłopotliwe.
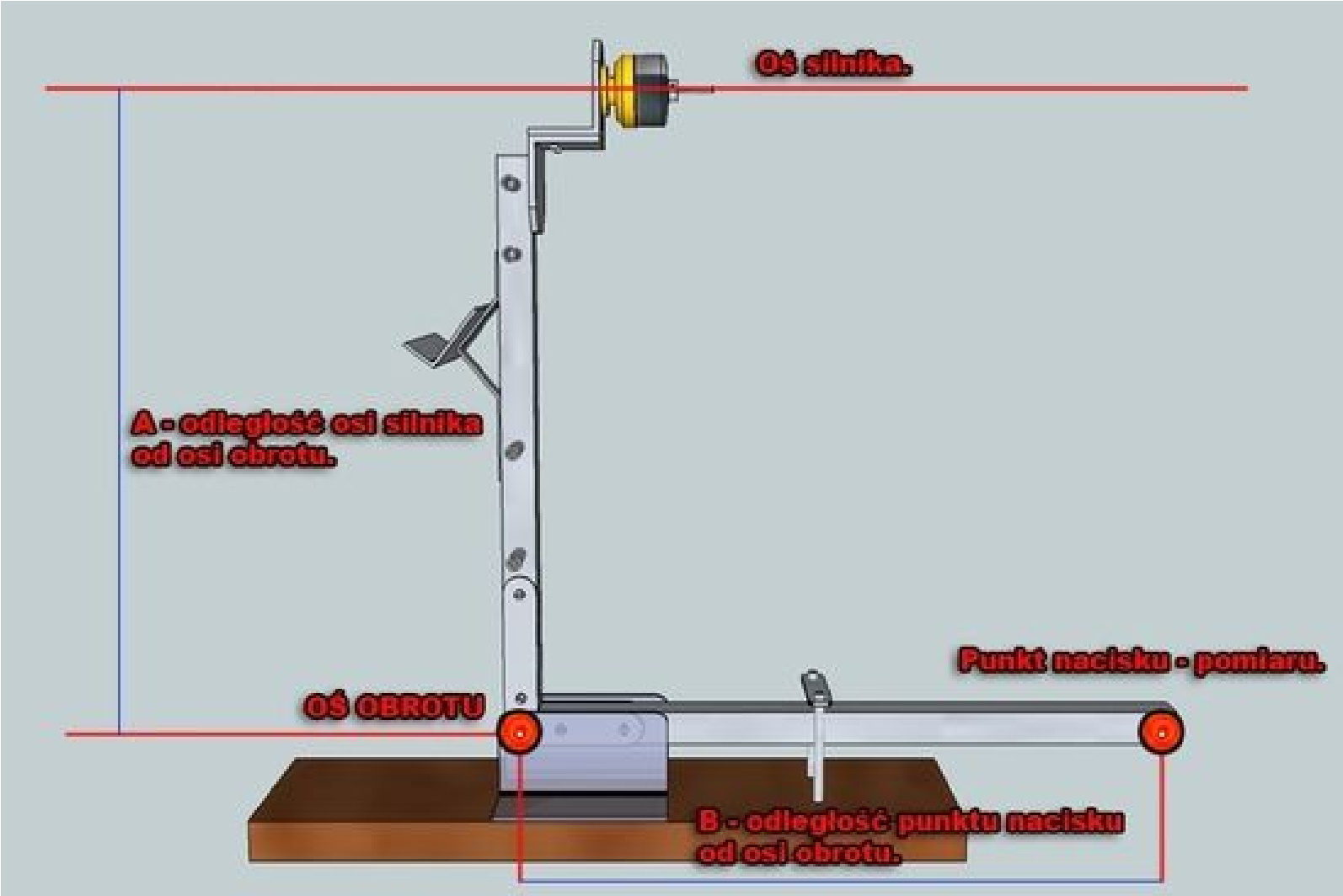
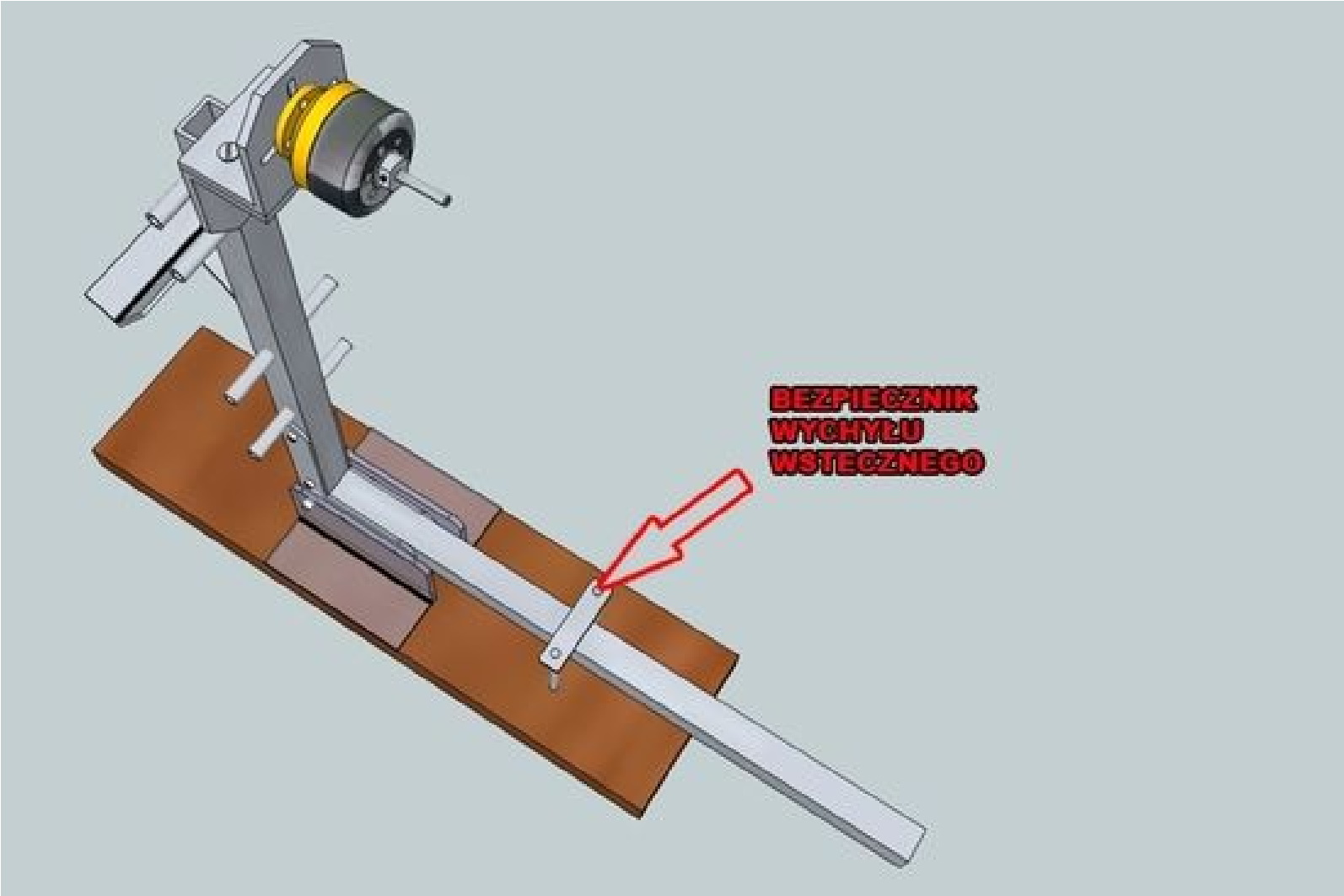
Zasada działania takiej hamowni jest bardzo prosta. Uruchomiony napęd wytwarza ciąg starając się przechylić (obrócić) cały zespół wokół osi obrotu wytwarzając w ten sposób nacisk na szalkę wagi. Pomiar tego nacisku na wadze daje nam obraz ciągu statycznego napędu. Hamownia tego typu bezwarunkowo musi być odpowiednio zabezpieczona przed wychyłem wstecznym. Wychył taki następuje w wypadku błędnego dołączenia silnika do regulatora i powoduje nagłe przechylenie ramienia w tył narażając nas na pokaleczenia. Generalnie w trakcie pomiarów należy zachować zdrowy rozsądek i odpowiednie warunki bezpieczeństwa. Po pierwsze nigdy nie stajemy w osi silnika – śmigła przed hamownią. Źle zamocowane śmigło lub kołpak mogą odpaść mając nadaną sporą energię kinetyczną. Staramy się hamownię tak umocować czy też umieścić w takim miejscu, aby takie śmigło wyrządziło jak najmniej szkód. Nie stajemy też nigdy w płaszczyźnie obrotu śmigła. Oderwana i odlatująca w bok łopatka może „narobić niezłego bigosu”. W trakcie pomiarów robimy to w skupieniu i z uwagą, dobrze jest mieć obok siebie pomocnika – modelarza. W żadnym wypadku nie pozwalamy, aby w pobliżu przebywały dzieci, zwierzęta lub osoby postronne.
Szczegóły budowy hamowni
W ogólnym zarysie, stanowisko pomiarowe składa się z trwale przymocowanej do blatu stołu hamowni. Tutaj możemy zastosować ściski stolarskie lub też przykręcić hamownię do blatu śrubami. Na ramieniu hamowni jest zamocowany mierzony silnik, są dołączone przewody zasilające, regulator, źródło zasilania, miernik mocy elektrycznej (Watt Meter). Istotnym jest też odpowiednie oświetlenie miejsca. Gdy dodatkowo wykonujemy pomiar szybkości obrotowej śmigła, najodpowiedniejszym miejscem będzie podwórze i światło dzienne, słoneczne. A to z tej racji, że niektóre obrotomierze są wrażliwe na migotanie żarówek, świetlówek i mogą podawać fałszywe wyniki pomiaru.
Elementy składowe hamowni to:
- Zespół ramienia wykonany z kształtowników aluminiowych o przekroju kwadratowym - zespół łożyska ramienia z kątowników. mocowanie łożysk w gniazdach wyciętych z plexi.
- Zabezpieczenie przed odchyleniem się do tyłu wykonane z płaskownika aluminiowego.
- Głowice mocowania silników, jedna płaska uniwersalna, druga wysunięta w przód do pomiarów napędów ze składanymi łopatkami.
- Podpórka pod miernik mocy.
Wszystkie części wycięto za pomocą podstawowych narzędzi i z prefabrykatów dostępnych w marketach dla majsterkowiczów.
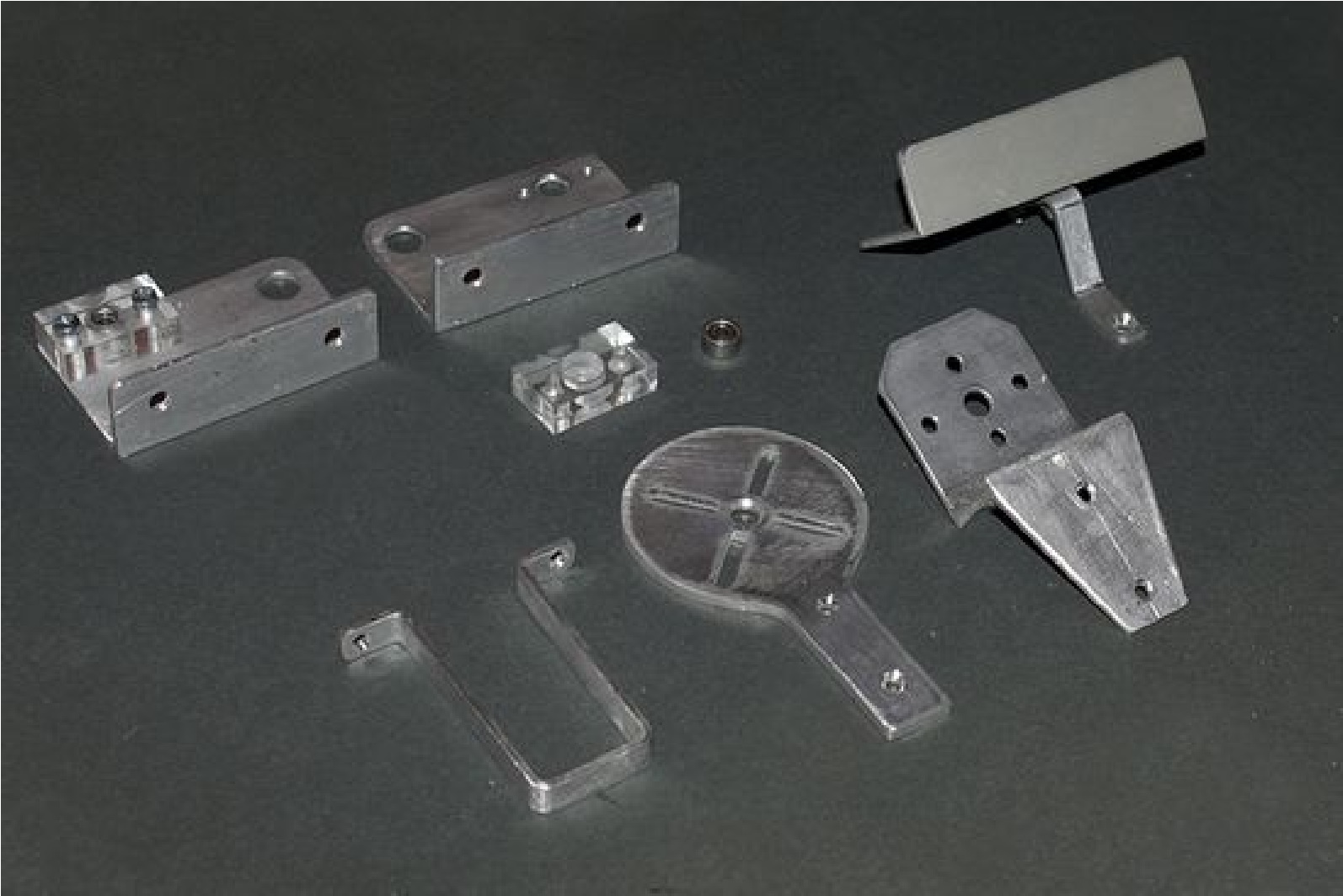
Głowicę uniwersalną do mocowania napędu wycięto z blachy aluminiowej o grubości 3mm. W środku wykonano otwór na wał silnika. Wykonane po bokach podłużne otwory w kształcie krzyża pozwalają na zamontowanie, czyli przykręcenie dowolnego silnika o dowolnym rozstawie śrub mocujących łoża. Sama głowica jest mocowana do ramienia za pomocą śrub motylkowych o średnicy 4mm. Głowica ta pozwala na zamocowanie napędu zarówno „za wręgą” jak i „przed wręgą”. Służy głównie do pomiaru śmigieł osadzanych na propsaverze lub kołpaku.
Głowica kątowa z oddaleniem służy do pomiarów silników klasy 35XX i 42XX mocowanych „za wręgą”. Czoło głowicy jest odddsunięt do przodu, ponieważ za pomocą tej głowicy wykonuję głównie pomiary napędów do elektroszybowców, w których używa się śmigieł ze składanymi łopatami. Otwory montażowe silnika i otwór przelotowy wału wymiarowo odpowiadają mocowaniom silników klasy 35XX. Samą głowicę wycięto z dwóch kawałków kątownika aluminiowego. Elementy zostały ze sobą sklejone klejem do aluminium i dodatkowo skręcone. Głowica mocowana do ramienia tymi samymi śrubami motylkowymi co głowica uniwersalna.
Tacę do mocowania miernika wycięto z kątownika aluminiowego i skręcona z hamownią z pomocą wygiętego płaskownika. Do tacy tej z pomocą gumek mocowany jest miernik modelarski (Watt Meter). W ramieniu samej hamowni widać kilka rurek przelotowych o średnicy 6mm. Służą one do zamocowania regulatora, pakietu napędowego itp. Wszystkie elementy składowe hamowni zostały ze sobą sklejone klejem do aluminium i dodatkowo skręcone śrubami. Miało to na celu niwelację drgań, możliwości poluzowania się połączeń itd.

Podstawę hamowni wykonano z płyty meblowej, do której z pośrednictwem dystansów z płytek plastikowych o grubości 5mm przykręcono czterema wkrętami zespół łożyska. Zespół łożyska wycięto kątownika aluminiowego. Same łożyska osadzono w gniazdach z przeźroczystej plexi. Oś stanowi kawałek pręta stalowego o średnicy 4mm. Pomiędzy samym ramieniem a ściankami zespołu łożyska dodatkowo zastosowano podkładki dystansujące z teflonu. Od przodu ramię poziome zabezpieczone przed wstecznym wychyłem z pomocą wygiętego odpowiednio i przykręconego płaskownika aluminiowego. Budując taką hamownię zwracamy uwagę na pewność i trwałość połączeń. „Zespół łożyska” możemy zrobić w inny sposób, nie jest konieczne używanie łożysk kulkowych, możemy zastosować łożysko typu „panewka”, łożysko zrobione z samego pręta i kawałków teflonu. Istotnym jest, aby samo łożysko nie powodowało zbyt dużego tarcia.
Dodatkowe wyposażenie hamowni
Oprócz samej hamowni i wagi elektronicznej do wykonania pomiaru potrzebne nam będą jeszcze dodatkowe przyrządy i wyposażenie.
Watt Meter – czyli miernik mocy elektrycznej. Miernik ten wyposażony jest w dwuwierszowy wyświetlacz i pozwala nam na pomiar i odczyt następujących parametrów : napięcie zasilające regulator, sumaryczne natężenie prądu pobieranego przez silnik z akumulatora, moc elektryczna pobierana z akumulatora, zużycie prądu w Ah, zużycie energii w Wh. Warto zaopatrzyć się w miernik o jak największym zakresie pomiarowym, gdyż z biegiem czasu zapewne będziemy mierzyli coraz większe i mocniejsze napędy.

Tester serwomechanizmów. Pozwala nam na - oprócz sprawdzenia serwomechanizmów i innych urządzeń dołączanych do odbiornika RC - komfortowe wysterowanie naszego stanowiska pomiarowego. W razie braku testera musimy w układ wpiąć odbiornik RC z wyjściem PWM, a wówczas napęd kontrolujemy za pomocą nadajnika spatowanego z tym odbiornikiem. Jest to jednak mało niewygodne i skomplikowane.

Optyczny miernik obrotów. Używany, gdy dodatkowo zależy nam na pomiarze liczby obrotów śmigła. Przyrząd uniwersalny pozwala na pomiar śmigieł od 2- do 9-łopatkowych oraz na pomiar obrotów napędów tunelowych. Bolączką niektórych mierników tego typu jest to, że wymagają odpowiednich warunków oświetlenia. Nie sprawdzają się w pomieszczeniach, w których jest używane światło fluorescencyjne (świetlówki), ponieważ często zamiast obrotów śmigła mierzą częstotliwość migotania światła. Dlatego pomiary obrotów najlepiej jest wykonywać przy oświetleniu dziennym.

Termometr elektroniczny. Przydatnym przyrządem może też okazać się bezdotykowy termometr elektroniczny, który pozwoli nam zmierzyć temperaturę silnika lub regulatora.
Procedura pomiaru
W trakcie wykonywania pomiarów musimy przede wszystkim (o czym już pisałem) zadbać o odpowiednie warunki i bezpieczeństwo. W pomieszczeniu, w którym wykonujemy pomiary nie powinno być lekkich przedmiotów, które mogą zostać porwane przez strumień powietrza. O ile małe i lekkie silniki nie stanowią zbyt dużego zagrożenia, o tyle mocny napęd i duże śmigło potrafi już nieźle „namieszać”. Sama hamownia powinna być trwale i pewnie umocowana na stanowisku. Przestrzeń przed czołem hamowni w osi śmigła powinna być wolna i najlepiej wystarczająco długa. Musimy pamiętać, że napęd uruchomiony na pełnych obrotach potrafi zassać dużą ilość powietrza. Kołpak i śmigło powinny być wyważone przed pomiarem. Ma to wpływ na trwałość silnika i oczywiście bezpieczeństwo nasze oraz innych osób. Dbamy o to, by nie znaleźć się w płaszczyźnie wirowania śmigła - urwana w trakcie ruchu łopatka śmigła może zranić. Na czas pomiaru zakładamy okulary ochronne.
Trwale mocujemy hamownię i trwale do głowicy przykręcamy silnik. Montujemy kołpak i/lub propsaver, tak by wyeliminować możliwość odkręcenia się śmigła w trakcie ruchu. Podczas testowania napędów ze składanymi łopatkami dokręcamy je mocniej do kołpaka, aby nie opadały pod własnym ciężarem. W momencie rozruchu następuje szarpnięcie i zbyt luźne łopatki mogą się złożyć i uderzyć w ramię pionowe hamowni wyłamując się i stwarzając zagrożenie.
Schemat elektryczny połączeń jest taki sam, jak w modelu z tym, że zamiast odbiornika używamy testera serw, a pomiędzy regulator i pakiet włączamy miernik mocy elektrycznej Watt Meter. Silnik łączymy z regulatorem, regulator dołączamy do wyjścia testera serw, zasilanie regulatora wpinamy w wyjście miernika mocy.

Ustawiamy pokrętło testera na minimum (minimalne obroty) i dołączamy akumulator. Po tej czynności włączamy wagę i czekamy aż się wytaruje wskazując na wyświetlaczu zero.
Wszystko ustawiamy tak by mieć bez problemowy wgląd w wyświetlacz wagi i wyświetlacz Watt Metera. Uruchamiamy silnik i powoli rozpędzamy go do obrotów maksymalnych uważając na to, czy całość nie wpada w drgania. Mogą one być spowodowane luźnymi połączeniami mechanicznymi w samej hamowni, źle zamocowanym silnikiem, źle wyważonym śmigłem itp. W wypadku silnych drgań natychmiast zmniejszamy obroty, odłączamy akumulator i szukamy przyczyny, aby ją wyeliminować. Jeśli wszystko jest w porządku i rozpędziliśmy silnik do obrotów maksymalnych, odczytujemy z wagi siłę nacisku, zaś z miernika mocy pobierany prąd i moc elektryczną. Dane te najlepiej jest zapisać w tabeli, w której uwzględniamy typ silnika, wymiary śmigła, typ akumulatora, jaki stosowaliśmy podczas pomiaru, notujemy otrzymane wyniki maksymalne. Wyniki te pojawią się na wyświetlaczach natychmiast po rozpędzeniu i z upływem czasu będą maleć na skutek rozładowania akumulatora. Sam pomiar wykonujemy przez około minutę, tak by uzyskać wynik średni. Zmierzone parametry dają nam obraz właściwości wybranej konfiguracji napędu. Przy zmianie typu śmigła nowy pomiar wykonujemy przy w pełni naładowanym akumulatorze. Ważne, aby był to ten sam akumulator, ponieważ jeśli oprócz śmigła zmienimy i akumulator na inny (na przykład, o innej wydajności prądowej) otrzymany wynik nie będzie miarodajny. Dobrze jest notować sobie na przyszłość wszystkie dane i wyniki pomiarów tworząc w ten sposób bazę danych dla siebie i dla innych.
Interpretowanie wyników pomiarów
Analizując otrzymane wyniki jesteśmy w stanie dobrać stosowny napęd do naszych potrzeb. Jesteśmy też w stanie oszacować czas lotu modelu. Przykładowo, pakiet o pojemności 2200mAh przy poborze prądu 2,2A teoretycznie powinien umożliwić lot trwający 60 minut. Jeśli odczytaliśmy pobór prądu w granicach 18A, to wyliczamy współczynnik, który dla tego akumulatora wynosi 2,2 x 60 = 132 i dzielimy go przez 18. W wyniku otrzymujemy około 7,3 minut lotu. Przy poborze prądu 15A otrzymamy 132 : 15 = 8,8 minut. Dla akumulatora 1300mAh i poboru 12A otrzymamy 1,3 x 60 = 78 i 78:12 = 6,5 minut lotu. Oczywiście, uzyskane w warunkach statycznych wyniki są tylko przybliżone, gdyż w locie z racji ruchu postępowego modelu występują inne opory, mniejszy pobór prądu itd. Trzeba też pamiętać o tym, że wykonaliśmy jedynie pomiar samego napędu. Pod uwagę musimy też wziąć pobór prądu w odniesieniu do reszty modelu, czyli (przy tej samej baterii zasilającej resztę mechanizmów modelu) odbiornik i serwa. Przez to czas lotu ulegnie skróceniu.
Istotnym jest, by w trakcie eksploatacji nadmiernie nie rozładowywać akumulatora, czy też nie rozładowywać go do wartości granicznych. Ma to niebagatelny wpływ na jego trwałość. Generalnie, w warunkach eksploatacyjnych mamy do dyspozycji ok 90 % pojemności znamionowej akumulatora i sugerowanie się jego pełną pojemnością wynikającą ze specyfikacji technicznej może nas narazić na przykrą niespodziankę. Uwarunkowane jest to wieloma względami, więc zdarza się, że specyfikacja swoje, a eksploatacja swoje. Praktyka wskazuje, że pojemność faktyczna akumulatora jest niższa od sygnowanej, aczkolwiek bywają też wypadki, że do akumulatora można „wpompować” podczas ładowania więcej energii, niż wynika to z etykiety. W Bazie Wiedzy można znaleźć osobny artykuł na temat sposobu dobierania akumulatora do modelu.
Przykład wyboru śmigła
Celem naszego zadania jest dobranie napędu, a właściwie odpowiednich łopatek śmigła do modelu akrobacyjnego motoszybowca. Ciężar modelu wynosi 1650g. Zależy nam na maksymalnie szybkim, wręcz pionowym wznoszeniu. Z założeń wynika, iż potrzebny nam do tego będzie ciąg statyczny wynoszący około 1800g. Do dyspozycji mamy silnik napędowy EMP 3542/02 – 1250 Kv. Dysponujemy regulatorem 70-amperowym i akumulatorem Turnigy Nanotech 2200/3S1P oraz łopatkami wymienionymi w tabeli. Notujemy kolejne pomiary za każdym razem oczywiście ładując akumulator napędowy i uzyskujemy wyniki umieszczone w tabeli.
|
Łopaty |
Prąd maksymalny |
Maksymalna moc elektryczna |
Maksymalny ciąg statyczny |
Prąd średni |
Moc elektryczna średnia |
Średni ciąg statyczny |
Odczuwalna temperatura silnika |
|
9 x 6 plastykowe |
26 |
270 |
1000 |
24 |
245 |
960 |
zimny |
|
10 x 6 plastykowe |
39 |
435 |
1650 |
36 |
380 |
1600 |
zimny |
|
11 x 6 plastykowe |
53 |
595 |
2160 |
48 |
500 |
1900 |
ciepły |
|
11 x 6 węglowe CamProp |
52 |
585 |
2250 |
48 |
500 |
2000 |
ciepły |
|
12 x 6 plastykowe |
58 |
600 |
2350 |
56 |
580 |
2200 |
gorący |
Z zaprezentowanej tabeli z wynikami pomiarów wynika, iż najodpowiedniejsze dla naszego modelu i założonego typu latania będą łopaty z pozycji 4. Mają ten sam skok i średnicę co łopaty z pozycji 3. Wynik jednak jest trochę inny i najpewniej wpływ na to miał kształt łopat i ich sztywność. Dadzą nam one maksymalnie szybkie wznoszenie, czas trwania lotu silnikowego „na pełnym gazie” wynoszący około 3 minut. Jest to motoszybowiec, więc spokojnie wykonamy nim około 6, 7 wejść na maksymalny pułap. Całkowity czas lotu powinien oscylować w granicach 25...30 minut. Mamy zapas ciągu, więc możemy też wymienić akumulator na większy. Gdyby zależało nam na spokojniejszym wznoszeniu, możemy założyć łopaty z pozycji 2.
Oczywiście otrzymane wyniki są przybliżone i teoretyczne, ale dają nam skalę porównawczą i możliwość jako takiego wyboru i pola manewru. Zachęcam do zbudowania na własne potrzeby stanowiska pomiarowego i pomiarów napędów.
Marzec 2014, Tomasz Motyl „Motylasty”
Fotografie i rysunki: archiwum własne