Definiowanie modelu szybowca. Aparatura Graupner MC-20/26/28
Współczesne aparatury do zdalnego sterowania mają sporo możliwości, ale jest to okupione skomplikowanym, rozbudowanym menu. Niestety, często jesteśmy zaniedbywani przez producentów sprzętu, którzy nie zapewniają instrukcji obsługi w języku polskim. W tekście zaprezentowałem swój sposób na wykonanie definicji modelu szybowca (bez silnika), modelu na zbocze lub klasy F3J.W kolejnych krokach opisano definicję nastaw modelu szybowca, który wyposażono w 6 serwomechanizmów. Skrzydła mają 2 lotki oraz 2 klapy. Model ma usterzenie motylkowe sterowane za pomocą dwóch niezależnych serwomechanizmów. Przykładową definicję wykonano dla modelu Jaskółka produkowanego przez firmę Modelot z Bielawy. Wbrew obiegowej opinii, jeśli spodziewamy się, że odległość pomiędzy nadajnikiem a odbiornikiem nie przekroczy 2 tys. metrów (taki zasięg deklaruje producent), to model szybowca mający 6 serwomechanizmów może być sterowany za pomocą odbiornika 6-kanałowego, to jest na przykład GR-12. Jeśli jest wymagany większy zasięg lub chcemy uzyskać bardziej niezawodną transmisję, to należy zastosować odbiornik GR-16, dla którego producent podaje zasięg wynoszący około 4 tys. metrów.
Zasięg jest podawany w warunkach idealnych. W terenie mogą mieć na niego wpływ różne czynniki zewnętrzne, takie jak przeszkody terenowe, źródła sygnału radiowego itp. Odbiorniki GR-12 i GR-16 różnią się między sobą nie tylko liczbą obsługiwanych kanałów, ale także liczbą anten. Odbiornik GR-16 ma 2 anteny, co przy ich poprawnym ustawieniu (pod kątem 90 stopni względem siebie) pozwala na wykorzystanie zalet technologii MIMO i przez to zwiększenie zasięgu. Model Jaskółka z fotografii to typowy szybowiec zboczowy, którym ze względu na stosunkowo nieduże wymiary lata się raczej w niewielkiej odległości, nieprzekraczającej tysiąca metrów. Dlatego używam w nim odbiornika 6-kanałowego.
Połączenie odbiornika z serwomechanizmami
Sposób dołączenia odbiorników GR-12 i GR-16 do poszczególnych serwomechanizmów podano w tabeli 1.
Tabela 1. Połączenia odbiornika z serwomechanizmami
| Opis funkcji | Numer kanału | |
| GR-12 | GR-16 | |
| Prawa klapa | 1 | 7 |
| Lewa lotka | 2 | 2 |
| Lewa strona usterzenia „V” | 3 | 3 |
| Prawa strona usterzenia „V” | 4 | 4 |
| Prawa lotka | 5 | 5 |
| Lewa klapa | 6 | 6 |
Model nie ma silnika, co uwalnia kanał kontrolny nr 1 typowo przeznaczony do jego sterowania. Dzięki temu kanał 1 może być używany do kontrolowania prawej klapy, która to normalnie jest dołączona do kanału 7. W celu zasilenia odbiornika GR-12 oraz serwomechanizmów jeden z kanałów będzie musiał być wyposażony w kabel „Y”, to jest gniazdo oraz dwa wtyki połączone równolegle. Gniazdo dołączamy do wyjścia odbiornika, natomiast wtyki do odpowiedniego serwomechanizmu oraz do baterii zasilającej. Zasilanie można włączyć/wyłączyć dołączając lub odłączając akumulator (rysunek 1).
Przy użyciu odbiornika GR-16 lub GR-24 zasilanie może być dołączone do dowolnego nieużywanego kanału (rysunek 2).
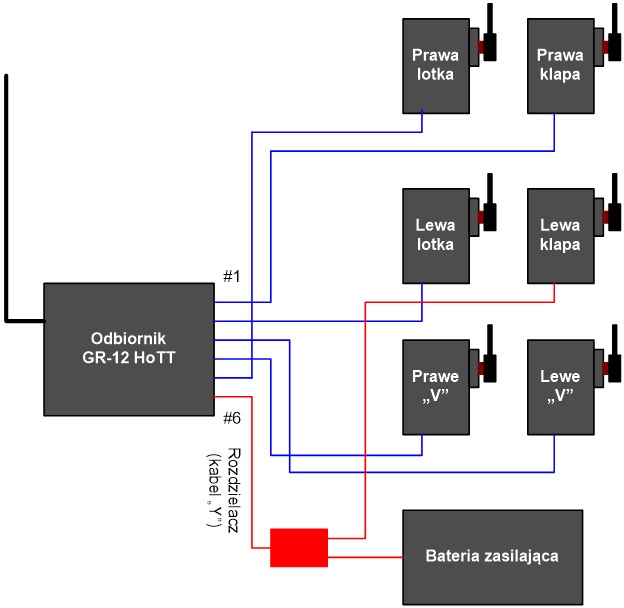
Rysunek 1. Połączenia odbiornika GR-12 w modelu szybowca Jaskółka
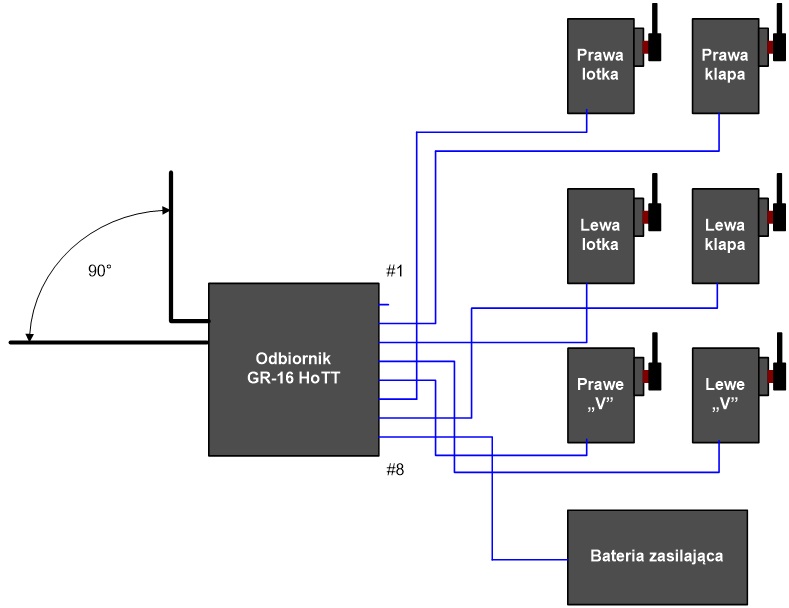
Rysunek 2. Połączenia odbiornika GR-16 w modelu szybowca Jaskółka
Podczas wprowadzania nastaw za każdym razem wyboru dokonuje się za pomocą przycisków kursora, najczęściej tych po prawej stronie pulpitu. Wybór zatwierdza się przyciskiem SET, a rezygnuje z niego ESC.
Podstawowe ustawienia modelu
Zakładamy, że na liście modeli mamy pozycje oznaczone ***free***, co oznacza, że dana pozycja jest wolna. W menu głównym wskazujemy Model select, a następnie ***free***. Po wyświetleniu ekranu Select model type wybieramy symbol samolotu i potwierdzamy dotykając SET.
Pojawi się pytanie BIND? o to, czy chcemy przyporządkować do tej pozycji odbiornik. Dotykamy ESC po lewej stronie co spowoduje zamkniecie okienka bez dołączenia odbiornika – zrobimy to na późniejszym etapie, po określeniu typu modelu oraz wstępnym ustawieniu serwomechanizmów.
Po zamknięciu okienka BIND? dotykamy SET po prawej stronie i z wyświetlonego menu wybieramy Base setup model. Podświetlamy pierwszą pozycję Mod.name, dotykamy SET i wpisujemy nazwę modelu. W tym przykładzie jest to Jaskolka. Dla przypomnienia, litery wybieramy za pomocą w lewo/w prawo po lewej stronie, natomiast na ramce nazwy przesuwamy kursor za pomocą w lewo/w prawo po prawej stronie. Wpisywanie nazwy kończymy dotykając ESC. Jeśli chcemy usunąć literę pozostawiając w jej miejscu pustą przestrzeń, to po prawej stronie jednocześnie dotykamy w prawo/w lewo.
Po wpisaniu nazwy podświetlamy linię Stick mode. Jest to linia, w której możemy określić tryb pracy drążków sterowniczych. Osobiście używam Mode 2, w którym drążek gazu oraz steru kierunku jest po lewej stronie, a drążek lotek i steru wysokości jest po prawej. Parametr Mode może być zmieniony po dotknięciu SET za pomocą przycisków w górę/w dół po prawej stronie. Ustawianie kończy ponowne dotknięcie SET.
Binding model type określa rodzaj powiązania pomiędzy nadajnikiem a odbiornikiem. Typowo należy wybrać Model, co oznacza indywidualne powiązanie tylko z tym modelem i tylko z jednym, względnie dwoma odbiornikami. Linię module na razie pomijamy. W linii DSC Output wybieramy PPM16, co umożliwia kontrolowanie 8 kanałów. Po dokonaniu wyboru dotykamy ESC, co powoduje powrót do menu głównego.
Typ modelu
Teraz z menu głównego wybieramy linię Model type i dotykamy SET. Nasz model nie ma silnika, więc w linii Motor at C1 wybieramy None (brak silnika). W linii Tail type (rodzaj usterzenia) wybieramy V-tail, co spowoduje automatyczne załączenie miksera dla usterzenia motylkowego. Dla klasycznego usterzenia pozostawiamy Normal.
Tabela 2. Przełączanie faz lotu
| Wybrana faza lotu | Pozycja przełącznika | |
| SW11/12 | SW13 | |
| 1. Launch (start) | W dół | Dowolna |
| 2. Speed (prędkość) | W górę | Dowolna |
| 3. Normal (normalny lot) | Środek | Dowolna |
| 4. Thermal (lot w termice) | Środek | W górę |
Nasz model ma 2 klapy i 2 lotki sterowane za pomocą niezależnych serwomechanizmów. Dlatego w linii Aile/flaps (lotki/klapy) przyciskami w górę/w dół wybieramy parametr 2AIL2FL, który powoduje automatyczne przyporządkowanie funkcji kontrolnych do odpowiednich wyjść odbiornika. Linia Brake Off umożliwia nam zdefiniowanie położenia drążka gazu, które będzie powodowało wyłączenie hamulca. Aby ustalić je należy przesunąć drążek gazu w maksymalne położenie od siebie lub do siebie (zależnie od preferencji) i dotknąć SET.
Liczba -100% oznacza, że hamulec będzie wyłączony przy położeniu drążka do siebie, natomiast +100% – od siebie. Używam położenia -100%, co powoduje, że hamulec jest załączany w miarę pchania drążka do przodu. Hamulec może być załączany również za pomocą innych manipulatorów niż drążek gazu, jednak w tym przykładzie pozostańmy przy sterowaniu za pomocą drążka gazu i dlatego na prawo od wartości procentowej pozostawiamy parametr In 1, to znaczy sterowanie za pomocą kanału kontrolnego nr 1 (drążek gazu).
Po ustawieniu wartości, w której hamulec jest wyłączany dotykamy ESC i wracamy do menu głównego.
Ustawianie faz lotu
Używanie faz lotu chociaż pracochłonne przy definiowaniu, to mimo tego jest bardzo wygodne, ponieważ umożliwia nam określenie położenia powierzchni sterowych modelu i wartości trymerów indywidualnie dla każdej z faz lotu. W modelu szybowca można odrębnie ustawić położenie klap i lotek np. w fazach Launch (start) oraz Thermal (lot w termice).
Zwykle w modelach szybowców oraz motoszybowców definiuję 4 fazy lotu. Są to: start (Launch), normalny lot (Normal), lot szybki (Speed) oraz lot w termice (Thermal):
- W fazie start (Launch) albo same klapy, albo klapy wraz z lotkami są opuszczane o pewien kąt.
- W fazie prędkość (Speed) klapy są podnoszone w górę wraz z lotkami.
- W fazie termika (Thermal) klapy są nieco opuszczane.
- W fazie normalnego lotu klapy oraz lotki są w położeniu neutralnym.
Wykonajmy definicję 4 podanych wyżej faz lotu. W tym celu z menu głównego wybieramy Phase settings. Po pierwsze, nazwiemy fazę, a po drugie ustawimy powiadomienie głosowe.
W pozycji Pha1, w kolumnie Name dotykamy SET i z za pomocą przycisków w górę/w dół wybieramy Launch. Po jego wybraniu dotykamy SET i za pomocą przycisku przechodzimy na sam koniec, aż w dolnej linii wyświetli się napis Announce. Dotykamy SET i przyciskami w górę/w dół wybieramy komunikat głosowy 357.LAUNCH. Dotykamy SET i używając przycisku w dół przechodzimy do linii poniżej. Za pomocą w lewo cofamy się do pierwszej kolumny. Teraz po dotknięciu SET wybieramy Speed. Zatwierdzamy SET i dotykając w prawo przechodzimy do ostatniej kolumny po prawej stronie (Announce). Za pomocą w górę/w dół wybieramy komunikat głosowy 369.SPEED. Dotykamy SET.
W ten sam sposób w dwóch kolejnych liniach ustawiamy kolejno Normal oraz Thermal przyporządkowując im odpowiednio komunikaty 365.NORMAL oraz 359.THERMAL.
Po wykonaniu wymienionych wyżej czynności dotykamy ESC i wychodzimy do menu głównego.
Definiowanie przełączników faz lotu
Oprogramowanie nadajnika umożliwia nam przyporządkowanie przełączania faz lotu do przełączników logicznych i/lub do przełączników fizycznych. Przełącznikami fizycznymi nazywa się wszystkie przyciski, przełączniki, manipulatory i pokrętła fizycznie dostępne na aparaturze. Ich położenia można podejrzeć w menu Switch display. Po lewej stronie pulpitu, w jego lewym górnym rogu mamy dostępne przełączniki SW11/12 i SW13. Załóżmy, że będą one przełączały fazy lotu w taki sposób, jak opisano to w tabeli 2.
Definiowanie funkcji przełączników
- Z menu głównego wybieramy Phase assignment. Dotykając naprowadzamy ramkę na pole „C” znajdujące się pod napisem combi. 3-pozycyjny przełącznik SW11/12 ustawiamy w pozycji środkowej, natomiast 2-pozycyjny SW13 w pozycji w dół/do siebie. Dotykamy SET i po wyświetleniu komunikatu „Move desired switch…” przełączamy SW11/12 w pozycję w dół/do siebie.
- 3-pozycyjny przełącznik SW11/12 ponownie ustawiamy w pozycji środkowej, natomiast 2-pozycyjny SW13 w pozycji w dół/do siebie. Za pomocą przycisku przesuwamy ramkę w prawo na pole „D”. Dotykamy SET i po wyświetleniu komunikatu „Move desired switch…” przełączamy SW11/12 w pozycję do góry/od siebie.
- Nie zmieniając pozycji przełączników, za pomocą przycisku przesuwamy ramkę na pole „E”. Dotykamy SET i po wyświetleniu komunikatu „Move desired switch…” przełączamy SW11/12 w pozycję środkową.
- Nie zmieniając pozycji przełączników, za pomocą przycisku przesuwamy ramkę na pole „F”. Dotykamy SET i po wyświetleniu komunikatu „Move desired switch…” przełączamy SW13 w pozycję do góry/od siebie.
Przyporządkowanie faz lotu do przełączników
Kolejny raz dotykamy w prawo, aby przesunąć ramkę z pola „F” na sam dół, na pole z nazwą fazy lotu. Jest ono wyróżnione za pomocą znaków większości <nazwa fazy>. Teraz musimy przyporządkować poszczególne fazy do pozycji przełączników:
- Ustawiamy przełączniki SW11/12 oraz SW13 w pozycji do siebie/w dół. Jeśli jako pierwszą mamy zdefiniowaną fazę Launch (start), to w dolnej linii pojawi się komunikat „1 Launch”. Jeśli nie, to dotykamy SET i za pomocą wybieramy fazę 1 Launch. Wybór potwierdzamy dotykając SET.
- Przełączamy SW11/12 w pozycję środkową pozostawiając SW13 w położeniu do siebie/w dół, dotykamy SET. Przyciskami wybieramy z listy 3 Normal. Ponownie dotykamy SET.
- Przełączamy SW11/12 w pozycję od siebie/do góry pozostawiając SW13 w położeniu do siebie/w dół, dotykamy SET. Przyciskami wybieramy z listy 2 Speed. Ponownie dotykamy SET.
- Przełączamy SW13 w pozycję od siebie/w górę pozostawiając SW11/12 w pozycji od siebie/w górę, dotykamy SET. Przyciskami wybieramy z listy 4 Thermal. Ponownie dotykamy SET.
- Przełączamy SW11/12 w pozycję środkową pozostawiając SW13 w pozycji od siebie/w górę. Dotykamy SET. Przyciskami wybieramy z listy 4 Thermal. Ponownie dotykamy SET.
- Przełączamy SW11/12 w pozycję do siebie/w dół, pozostawiamy SW13 w pozycji od siebie/w górę, dotykamy SET. Przyciskami wybieramy z listy 4 Thermal. Dotykamy SET, aby potwierdzić wybór.
Testujemy nastawy zmieniając położenia przełączników. Aparatura powinna „mówić” informując nas o nazwie wybranej fazy lotu, a w dolnej linii ekranu powinna zmieniać się nazwa fazy lotu.
Przyporządkowanie odbiornika (bindowanie)
Włączamy zasilanie odbiornika. Warto zauważyć, że odbiorniki GR-12 i GR-16 są bindowane w różny sposób. Wchodzimy do menu głównego i wybieramy pozycję Base setup model. Za pomocą przycisków kursora przesuwamy ramkę na pole oznaczone n/a znajdujące się na prawo od pola HoTT. Sposób bindowania zależy od odbiornika. W odbiorniku GR-12 należy nacisnąć i przytrzymać przycisk bindowania oznaczony SET, a następnie (po podświetleniu pola n/a!) dotknąć przycisku SET w nadajniku. Połączenie z nadajnikiem jest sygnalizowane za pomocą koloru zielonego.
W odbiorniku GR-16 należy nacisnąć i przytrzymać przycisk bindowania oznaczony SET, aż dioda świecąca w odbiorniku zacznie świecić się na przemian na zielono i na czerwono. Wtedy puszczamy przycisk, a w nadajniku (po podświetleniu pola n/a!) dotykamy przycisku SET. Połączenie z nadajnikiem jest sygnalizowane przez wyłączenie koloru czerwonego.
Opcjonalnie dla GR-12: przekierowanie wyjścia odbiornika
Ze względu na niewielką liczbę dostępnych wyjść w odbiorniku GR-12 musimy przekierować kanał kontrolny nr 7 na wyjście 1, a kanał kontrolny nr 1 na nieistniejące wyjście 7.
Z menu głównego wybieramy Tx. output swap. Następnie, na wyświetlonej liście dotykamy SET w pozycji Tx Ch 1 -> Output 1. Za pomocą przycisków w górę/ w dół ustawiamy wartość 7. Po jej ustawieniu dotykamy SET. W linii wyświetli się Tx Ch 7 -> Output 1.
Teraz przesuwamy się ramką o kilka linii w dół na pozycję Tx Ch 7 -> Output 7 i po dotknięciu SET za pomocą ustawiamy wartość 1. Po jej ustawieniu dotykamy SET. W linii wyświetli się Tx Ch 1 -> Output 7.
Mikser skrzydeł
Aby ustawić mikser dla lotek i klap warto mieć włączony model, co umożliwi sprawdzenie ich funkcjonowania. W tym celu muszą być także dołączone i wstępnie ustawione serwomechanizmy.
Do ustawiania pozycji zerowej serwomechanizmu, zakresu jego ruchu oraz kierunku (odwrotny lub normalny) służy menu Servo adjustment. Zakładam, że te podstawy użytkowania są znane czytelnikowi. Można się z nimi zapoznać w instrukcji użytkownika, której tłumaczenie jest dostępne pod adresem bit.ly/2EGTtJ7.
Na początek sprawdzamy działanie steru wysokości. Lekko zaciągamy drążek – jeśli obie powierzchnie na motylku idą „do góry”, to ster działa poprawnie. Jeśli nie, to dla konkretnej powierzchni załączamy funkcję reverse. Teraz sprawdzamy działanie steru kierunku. Jeśli obie powierzchnie usterzenia wychylają się w tę samą stronę zgodną z położeniem drążka, to sprawdzenie steru można uznać za zakończone. Jeśli nie, to przypuszczalnie kanał 3 i 4 są zamienione. Wychylając drążek ustawiamy symetryczne działanie obu powierzchni sterowych zmieniając wartość w kolumnie „- trv +”.
Sprawdzamy działanie lotek. Przy wychyleniu drążka w lewo prawa lotka powinna wychylić się w dół, a lewa unieść. Wychylając drążek ustawiamy symetryczne działanie (to znaczy, takie samo przemieszczenie) obu lotek zmieniając wartość w kolumnie „- trv +”.
Klapy nie będą działały dopóty, dopóki nie ustawimy ich funkcjonowania w mikserze skrzydeł. Ustalamy ich położenie początkowe pamiętając, że w odbiorniku GR-12 dzięki przekierowaniu kanału klapa prawa jest ustawiana za pomocą kanału 7, którego wyjście jest doprowadzone do wyjścia 1 odbiornika.
Dotykając ESC wchodzimy do menu głównego i z listy wybieramy Wing mixers. W pierwszej linii miksera noszącej nazwę Multi-flap menu => ustawiamy położenie początkowe lotek i klap. Możemy również ustawić pracę różnicową oraz przemieszczenie.
Mimo iż model z fotografii to typowy szybowiec na zbocze, to zamontowałem w nim hak i latałem z użyciem wyciągarki. Dlatego w fazie Launch (start) miał opuszczone klapy i lotki. Normalnie, przy rzucie z ręki na zboczu nie jest to potrzebne, więc w tej fazie albo można wprowadzić ustawienia neutralne, albo jakieś własne – preferowane, albo startować w fazie Normal (normalny lot).
Podświetlamy linię Multi-flap menu =>, dotykamy SET. Ustawiamy przełączniki SW11/12 i SW13 w położeniu w dół/do siebie. W dolnej linii ekranu powinna wyświetlić się nazwa fazy lotu, to jest Launch, a po prawej stronie AILE, co oznacza, że nastawy dotyczą lotek. Podświetlamy ramką pozycję Diff. Zwykle w szybowcu lotka opuszczana powinna przemieszczać się mniej, niż podnoszona. W linii Diff. można ustawić procentową różnicę tego przemieszczenia. Dla Jaskółki z fotografii było to 60%.
W celu wpisania wartości dotykamy SET. Następnie za pomocą ustawiamy żądaną liczbę. Można wychylić lotki w którąś stronę za pomocą drążka, a następnie ustawiać wartość jednocześnie mierząc ją. Po ustawieniu różnicy dotykamy SET i przechodzimy do linii fl.pos.
W linii fl.pos można ustawić, o ile zostaną opuszczone lotki. Dla mojej Jaskółki jest to 30%. Wartość wprowadzamy jak wyżej. Po jej ustawieniu przechodzimy w prawo. Na kolejnym ekranie wyświetlą się ustawienia dla klap. Podobnie jak poprzednio, w dolnej linii będzie wyświetlona nazwa fazy lotu Launch oraz nazwa zmienianego elementu, to jest FLAP (klapy). Praktycznie w tym momencie należy ustawić jedynie wartość w polu fl.pos. Dla Jaskółki wynosiła ona -45%. W czasie wprowadzania nastawy można zaobserwować opuszczanie się klap i zmierzyć je.
Przełączamy SW11/12 w pozycję środkową. W dolnej linii ekranu wyświetli się nazwa fazy Normal (normalny lot). W linii fl.pos dla FLAP powinno być 0%, identycznie jak po naciśnięciu w lewo i wejściu do ustawień AILE (lotki). Oczywiście, można wprowadzić inną, preferowaną wartość.
Przełączamy SW11/12 w pozycję do góry/od siebie. W dolnej linii ekranu wyświetli się nazwa fazy Speed (prędkość) oraz nazwa powierzchni sterowych AILE (lotki). W linii Diff. wprowadzamy taką samą wartość, jak dla fazy Normal (np. 60%), natomiast w linii fl.pos wartość wychylenia lotek w górę. Może to być -20% lub inna.
Po zatwierdzeniu nastawy (dotknięciu SET) naciskamy i przechodzimy do ekranu ustawień FLAP. Tu w linii fl.pos ustawiamy wartość wychylenia klap, na przykład 5%.
Przełączamy SW11/12 i SW13 w górę/od siebie. Na ekranie FLAP wyświetli się nazwa fazy Thermal (lot w termice). Zwykle w tej fazie nieznacznie opuszcza się klapy. Dlatego w pozycji fl.pos ustawiamy o ile mają być opuszczone klapy. Może to być np. -5%.
Po ustawieniu klap naciskamy i przechodzimy do ekranu AILE (lotki). W linii Diff. wprowadzamy taką samą wartość, jak dla fazy Normal (np. 60%), natomiast w linii fl.pos pozostawiamy wartość 0% (neutralna pozycja lotek).
Dotykamy ESC i wracamy do menu Wing mixers. Teraz zajmiemy się hamulcem, który w tym rodzaju szybowca uzyskuje się dzięki opuszczeniu obu klap i uniesieniu obu lotek. Ta pozycja powierzchni sterowych jest nazywana motylem (butterfly) lub krukiem (crow).
Po pierwsze musimy zdecydować, w której fazie będzie używany hamulec. Proponuję, aby były to fazy lotu normalnego i w termice. Pierwsza, ponieważ to naturalne, a druga, ponieważ łatwo zapomnieć się przy lądowaniu. Pamiętajmy bowiem, że hamulec będzie działał wyłącznie w tych fazach, w których zostanie załączony.
Ustawiamy przełącznik SW11/12 w pozycji środkowej, a SW13 w pozycji w dół/do siebie. Odpowiada to załączeniu fazy Normal.
Za pomocą w górę/w dół wybieramy linię Brake settings => i dotykamy SET. W górnej linii opisanej jako Crow, w pozycji po lewej stronie ustawiamy maksymalną procentową wartość uniesienia lotek. Dla mojej Jaskółki było to 35%. Zaleca się, aby było to około połowy maksymalnego uniesienia lotek. W kolejnej pozycji linii Crow (na prawo od pozycji lotek) ustawiamy maksymalną procentową wartość dla opuszczenia klap. W Jaskółce było to -40%. Nastawę sprawdzamy poruszając drążkiem gazu. Niektórzy załączając tę funkcję za pomocą wyłącznika – w tym przykładzie pozostawiono możliwość płynnej regulacji.
W linii D.red wprowadzamy procentową wartość redukcji wychylenia lotek. Jeśli będziemy poruszali drążkiem lotek, to zadziałają one w taki sposób, że wartość z drążka doda się do wartości ustawionej dla funkcji hamulca, co może spowodować, że lotka przemieści się poza dopuszczalną pozycję i w konsekwencji może to doprowadzić do uszkodzenia mechanicznego. Wartość w linii D.red pozwala na zredukowanie przemieszczenia unoszonej lotki. Dla Jaskółki była to wartość +60% (zbliżona do parametru w linii Diff. w menu Multi-flap menu =>).
Doświadczalnie i już w locie dobieramy parametr Elevator curve odpowiedzialny za offset przekładający się na wychylenie steru wysokości w miarę zmiany położenia drążka gazu. Załączenie hamulca powoduje silne opuszczenie klap, a przez to zadzieranie modelu, co kompensuje się oddając drążek steru wysokości. Wartość wpisana w linii Elevator curve umożliwia zautomatyzowanie oddawania drążka steru wysokości. Na tym etapie wprowadzania nastaw można wstępnie ustawić pewną wartość, ale dopiero próby w locie mogą ją potwierdzić.
Dla Jaskółki z tego przykładu wartość Point L wynosiła 0%, natomiast wartość Point H -35%. Zależność położenia drążka gazu od wychylenia steru wysokości była liniowa – linia prosta pomiędzy punktami minimalnego i maksymalnego wychylenia drążka. Aby wprowadzić wartości, przy załączonej fazie lotu przesuwamy drążek w pozycję, w której lotki i klapy wychylą się maksymalnie. W dolnej linii ekranu wyświetli się etykieta Point H. Puszczamy drążek gazu i dotykamy SET. Za pomocą wprowadzamy żądaną wartość (w Jaskółce było to -35%) i ponownie dotykamy SET.
Zmieniamy pozycję przełączników na odpowiadającą fazie Thermal. Powtarzamy czynności mające na celu ustawienie hamulca. Wpisujemy identyczne wartości, jak w fazie Normal.
Linie AI -> RU i FL -> EL pomijamy, nie wprowadzamy żadnych nastaw. Są to, odpowiednio, parametry umożliwiające zmiksowanie lotek ze sterem kierunku oraz klap ze sterem wysokości. Na tym etapie pozostawmy te parametry bez zmian.
Sprawdzamy działanie hamulca i równoczesną z nim pracę steru kierunku w stronę powodującą nurkowanie modelu.
Pomiar czasu
Dla swojej Jaskółki zdefiniowałem funkcjonowanie dwóch timerów: jeden odmierza całkowity czas lotu od momentu załączenia fazy Launch (start), co znajduje zastosowanie w funkcji logowania (zapis parametrów lotu na karcie SD; przydatny zwłaszcza wtedy, gdy jest dołączony moduł Vario) oraz pomiar czasu lotu odbywającego się w fazach Normal lub Thermal. Niestety, pomimo stosunkowo nieskomplikowanie sformułowanego zadania nie da się jednoznacznie określić jedynie na podstawie pozycji przełączników fizycznych, który timer ma odmierzać czas. Co prawda, można posłużyć się timerami faz lotu, ale te giną z ekranu po zmianie fazy. Aby mierzyć czas lotu trzeba posłużyć się włącznikami logicznymi.
Z czasem logowania jest łatwo. Jego pomiar inicjuje włączenie fazy Launch, a więc wystarczy przesunąć przełącznik SW11/12 w pozycję do siebie/w dół. Czas lotu powinien być mierzony wtedy, gdy przełącznik SW13 jest od siebie/do góry lub przełącznik SW11/12 jest w pozycji środkowej, co odpowiada fazom Normal i Thermal. Przy wyborze tych faz są rozwarte włączniki SW11 oraz SW12. A więc pozycji środkowej odpowiada włącznik SW11 = SW12 = wyłączony. Łatwo powiedzieć, ale niestety, ze względu na nieco prymitywną możliwość tworzenia warunków logicznych jest z tym trochę kłopotu.
Tabela 3. Definicje włączników logicznych
| Logical switch | ||||
| L1 | C1 |
AND | 10 |
L1 |
| L2 | --- | AND | --- | L2 |
| L3 | --- | AND | --- | L3 |
| L4 | --- | AND | --- | L4 |
Aby stwierdzić czy włącznik SW11 jest wyłączony należy posłużyć się wyrażeniem zaprzeczenia „NIE SW11”. Niestety, o ile można posłużyć się zanegowanym włącznikiem logicznym (odpowiadają im etykiety L1i, L2i itd., co oznacza „inwersja L1”, „inwersja L2”), o tyle nie ma możliwości zanegowania wartości włącznika fizycznego. Aby więc zbudować wyrażenie „NIE SW11” trzeba wykonać dwie operacje, które symbolicznie można zapisać następująco:
Wyrażenie logiczne 1 = włącznik AND włącznik
Wyrażenie logiczne 2 = NIE wyrażenie logiczne 1
W związku z tym, że SW11/12 jest 3-pozycyjny, to został tak przyłączony do płyty nadajnika, że integruje w sobie 2 wyłączniki: 1-pozycyjny oraz 2-pozycyjny, oznaczone „11” i „12” (stąd podwójna numeracja w nazwie SW11/12). Aby stwierdzić, czy SW11/12 jest w położeniu środkowym należy sprawdzić, czy SW11 jest wyłączony i czy SW12 jest wyłączony. Do tego wyrażenia trzeba jeszcze zsumować SW13, który odpowiada za włączenie fazy Thermal.
Całość wykonanych nastaw umieszczono w tabeli 3. Aby przepisać tabelę do aparatury należy wykonać następujące czynności:
- W menu głównym wybieramy pozycję Logical switch i dotykamy SET.
- Przełącznik SW11/12 ustawiamy w pozycji środkowej. W linii L1 w pierwszym polu po lewej dotykamy SET i po wyświetleniu okna z komunikatem zmieniamy pozycję przełącznika SW11/12 na do góry/od siebie.
- Ponownie ustawiamy przełącznik SW11/12 w pozycji środkowej. Dwukrotnie dotykamy . W polu po prawej dotykamy SET i zmieniamy pozycję przełącznika SW11/12 na do góry/od siebie. W ramach testu przełączamy SW11/12 w górę i w pozycję środkową. Stan przełącznika logicznego L1 po prawej stronie powinien zmieniać się na zwarty/otwarty.
- Ustawiamy przełącznik SW11/12 w pozycji środkowej i dotykamy . W linii L2 w pierwszym polu po lewej dotykamy SET i zmieniamy pozycję przełącznika SW11/12 na w dół/do siebie.
- Ustawiamy przełącznik SW11/12 w pozycji środkowej. Dwukrotnie dotykamy . W polu po prawej dotykamy SET i zmieniamy pozycję przełącznika SW11/12 na w dół/do siebie. Dla sprawdzenia przełączamy SW11/12 w pozycję środkową i w dół/do siebie. Stan przełącznika L2 po prawej stronie powinien zmieniać się na zwarty/otwarty.
- Dotykamy i przechodzimy do linii L3. W pierwszym polu po lewej dotykamy SET i po wyświetleniu okienka ponownie dotykamy SET. Z listy wybieramy L1 (włącznik logiczny nr 1). Dwukrotnie dotykamy . W polu po prawej dotykamy SET, a następnie z wyświetlonej listy wybieramy L2 (włącznik logiczny nr 2).
- Dotykamy i przechodzimy do linii L4. W pierwszym polu po lewej dotykamy SET i po wyświetleniu okienka ponownie dotykamy SET. Z listy wybieramy L3. Dotykamy a później SET. Za pomocą wybieramy OR i dotykamy SET. Dotykamy , a później SET. Po wyświetleniu okienka z komunikatem przełączamy SW13 w pozycję od siebie/do góry.
Sprawdzamy działanie przełączników logicznych. Symbol przy przełączniku logicznym L4 po prawej stronie powinien otworzyć się, jeśli SW13 jest wyłączony (pozycja w dół/do siebie), natomiast SW11/12 jest w pozycji innej, niż pozycja środkowa.
Zdefiniowaliśmy włączniki logiczne. Teraz przyporządkujmy je odpowiednim timerom.
Włączniki timerów
W menu głównym wybieramy Timers (general). Dotykając wybieramy linię z etykietą Top i dotykamy SET. Za pomocą wybieramy Stop i zatwierdzamy dotykając SET. Ponownie dotykamy i za pomocą SET wybieramy linię Centr:. Z wyświetlonej listy wybieramy Log t. Teraz 4-krotnie dotykamy , aż dotrzemy do ostatniej kolumny. Ustawiamy przełącznik SW11/12 w pozycję środkową. Dotykamy SET przy kursorze ustawionym na pozycji Centr:. Po wyświetleniu okienka z komunikatem zmieniamy pozycję przełącznika SW11/12 na do siebie/w dół. W ten sposób timer logowania zostanie uruchomiony po wybraniu fazy Launch.
Za pomocą przechodzimy do linii Top. W ostatniej kolumnie po prawej dotykamy SET i z wyświetlonej listy wybieramy L4. Timer będzie zatrzymywany, gdy L4 będzie otwarty, natomiast uruchamiany, gdy będzie zamknięty. Włącznik logiczny L4 będzie aktywny, gdy zostanie wybrana faza Thermal lub Normal.
Timer w górnej linii jest uruchamiany, jeśli faza lotu zostanie zmieniona na Normal lub Thermal. Timer pracuje dotąd, dopóki faza lotu nie zostanie zmieniona na Speed lub Launch.
Timer w dolnej linii jest uruchamiany, gdy faza lotu zostanie zmieniona na Launch.
Aby wyzerować oba timery należy wybrać tryb Speed i jednocześnie dotknąć po prawej stronie pulpitu.
Na koniec
Dzięki ustawieniu faz lotu będziemy mogli nie tylko zmieniać sposób zachowania się modelu poprzez wstępne ustawienie powierzchni sterowych, ale również trymować model zależnie od fazy. Aparatura daje nam możliwość kopiowania nastaw z modelu do modelu lub z karty do modelu, więc kolejnym razem będzie można posłużyć się właśnie wykonaną definicją. Często jest tak, że do tego samego celu prowadzą różne drogi. Ten opis proszę traktować jako zachętę do samodzielnego eksperymentowania bardziej, niż jako jedyną, najlepszą receptę.
Jacek Bogusz
Sekcja Modelarska/Aeroklub Poznański
j.bogusz@onet.eu
<<< Pobierz wersję PDF >>>